

Precise point positioning and inertia measurement tightly-coupled navigation system and data processing method thereof
A precise single-point positioning and inertial measurement technology, which is applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., to achieve the effects of improving navigation accuracy, increasing initial convergence speed, and high short-term accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] An embodiment of the present invention will be further described below in conjunction with accompanying drawing:
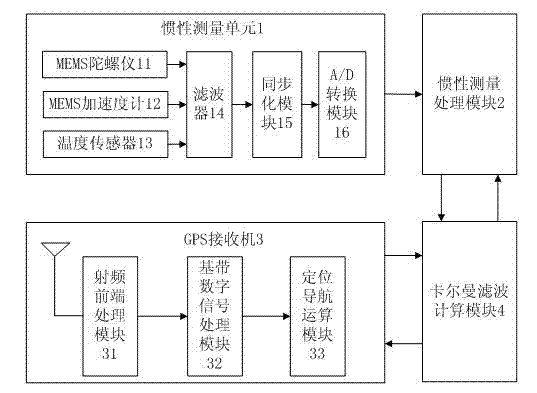
[0021] Such as figure 1As shown, the precise point positioning and inertial measurement tight integrated navigation system of the present invention is mainly composed of an inertial measurement unit 1, an inertial measurement processing module 2, a GPS receiver 3, a Kalman filter calculation module 4 and a power supply module. Among them: the inertial measurement unit 1 is mainly composed of Micro-Electro-Mechanical System (MEMS) sensors, and the inertial measurement unit 1 includes a MEMS gyroscope 11, a MEMS accelerometer 12, a temperature sensor 13, a filter 14, a synchronization The output terminal of MEMS gyroscope 11, MEMS accelerometer 12, temperature sensor 13 is connected in parallel on the filter 14, and filter 14 connects synchronization module 15, and synchronization module 15 connects A / D Conversion module 16. The MEMS gyroscope 11 is a silic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More