Compensation method based on generalized inner module for eccentric torque of three-shaft inertially stabilized platform
A three-axis inertial and stable platform technology, applied in the direction of electric speed/acceleration control, etc., can solve problems such as affecting stability accuracy, large noise of measured values, and limiting application ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
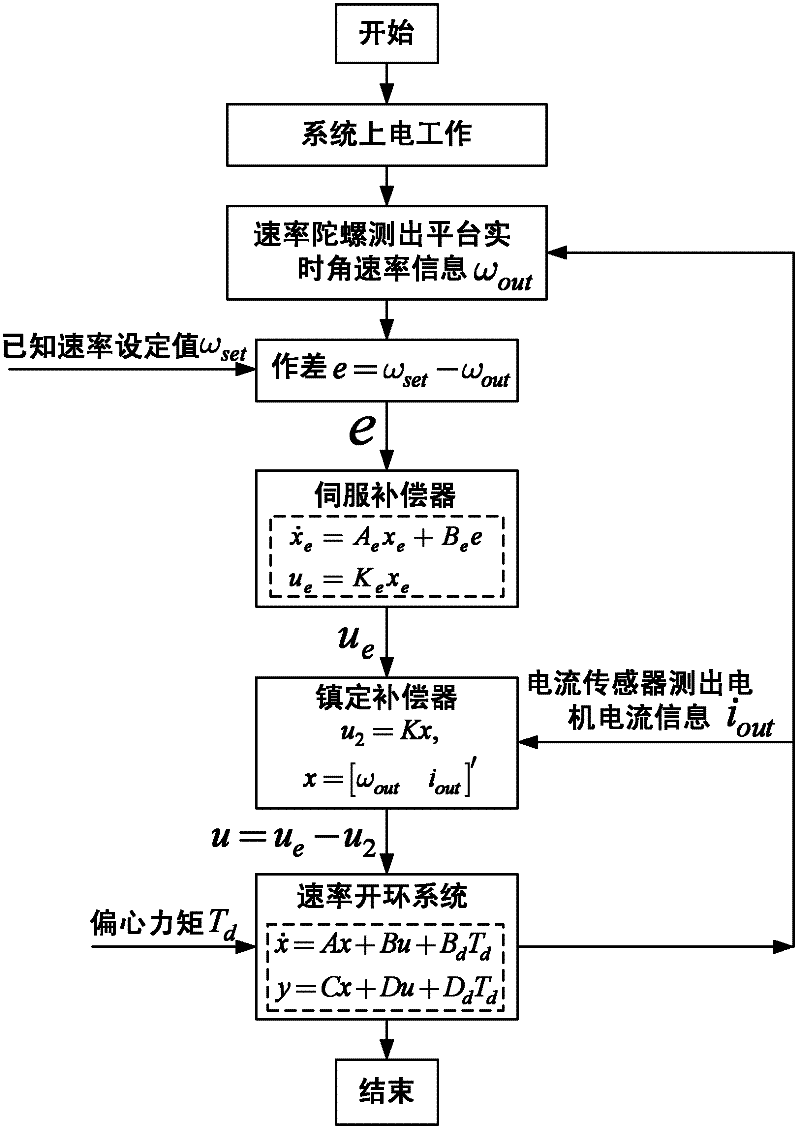
[0045] The specific implementation steps are as figure 1 Shown:
[0046] (1) The system is powered on, initialized, and the rate gyro signal acquisition circuit and the motor current signal acquisition circuit are officially working;
[0047] (2) Use the rate gyroscope installed on the frame axis of the three-axis inertial stabilized platform to measure the angular rate information ω of the three-axis inertial stabilized platform out , the angular rate information includes the angular rate information of the three-axis inertial stabilized platform under the simultaneous action of the motor control torque and the eccentric torque;
[0048] (3) The angular rate information ω obtained in step (2) out and angular rate setpoint ω set Make a difference to get the angular rate error e=ω set -ω out ;
[0049] (4) Bring the angular rate error e obtained in step (3) into the servo compensator to obtain the control value u e , the state space equation of the servo compensator is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com