Double-base-line non-cooperative target binocular measurement system
A technology of non-cooperative target and measurement system, applied in the field of non-cooperative target non-contact visual measurement, can solve the problems of inability to use, no sign, complicated monocular camera, etc., to increase the measurement distance range, reduce conditions, and reduce solar stray light the effect of interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
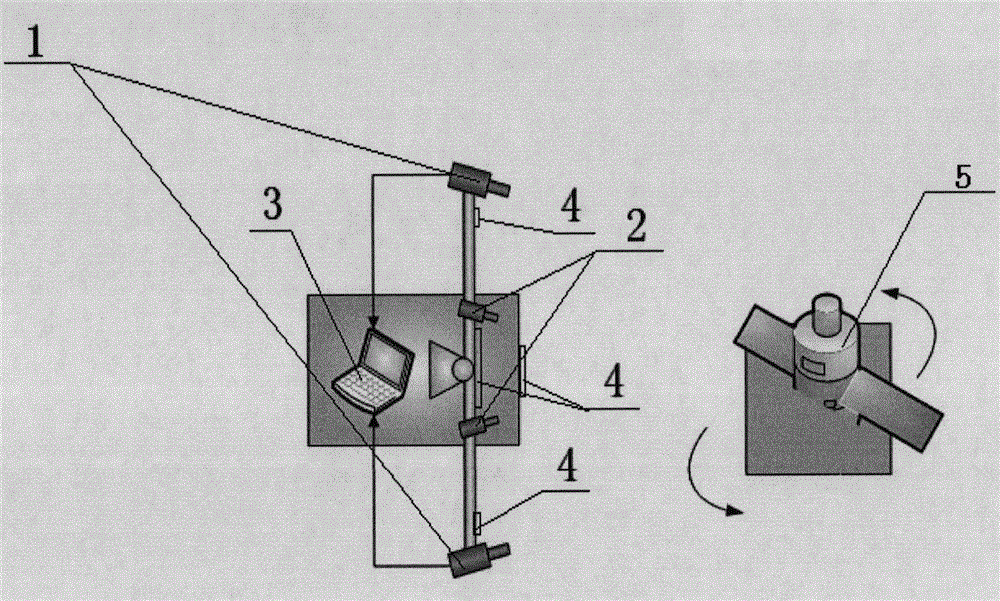
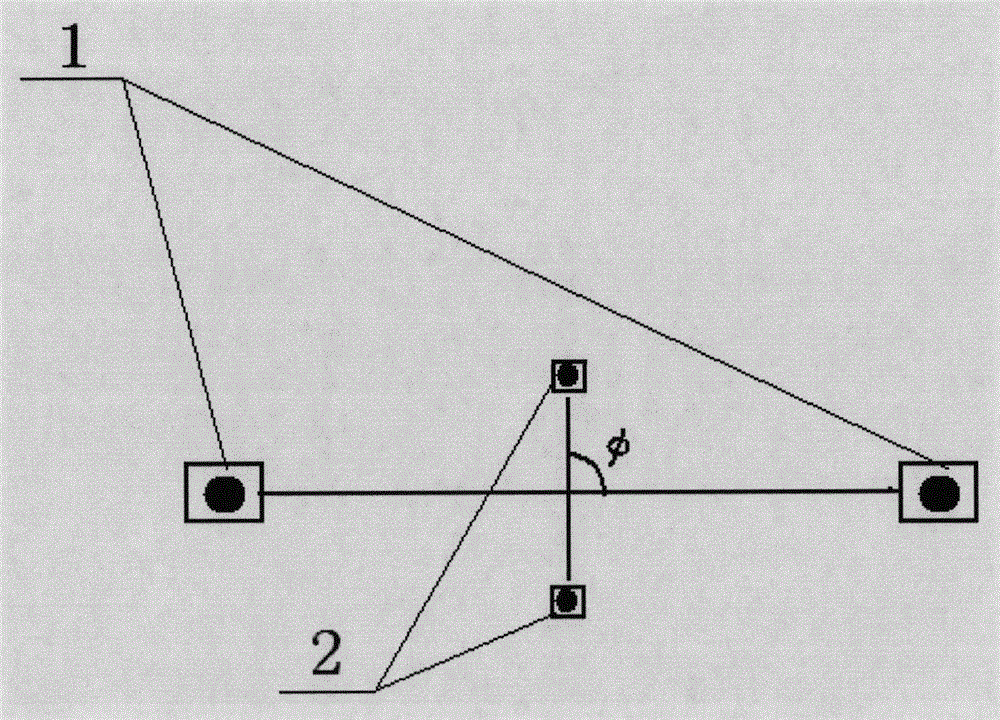
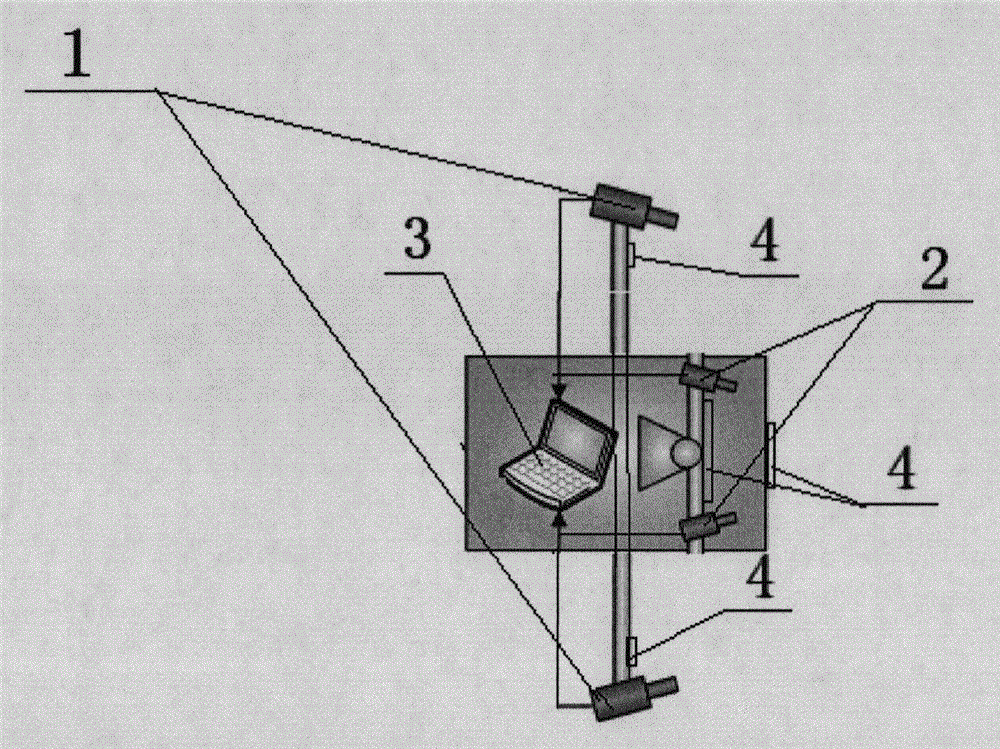
[0034] The measurement method of rendezvous and docking of non-cooperative targets in the ultra-short range adopts the active lighting binocular vision measurement system. Attitude measurement. The binocular vision measurement system generally includes two cameras whose optical axes are installed close to parallel, the design parameters of the two are the same, and the optical axes form a certain angle. The present invention proposes a new rendezvous and docking measurement system, which is different from the existing measurement system in that it does not need cooperative measurement targets such as marker lights and reflectors as auxiliary equipment, which can reduce the rendezvous and docking conditions, and is suitable for For rendezvous and docking capture of completely unknown targets, a visual measurement system composed of a pair of binocular cameras can be used at ultra-close distances to identify unknown target features and determine three-dimensional coordinates, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More