Collision avoidance system and method for a road vehicle and respective computer program product
An anti-collision system and a technology for road vehicles, applied in the field of anti-collision systems, can solve the problem of not obtaining a mechanical model, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The collision avoidance system can be implemented in an integral vehicle-mounted manner, or it can have components located outside the vehicle. Therefore, for example, the provision of information related to roadside targets or other vehicles, the calculation of probability density, etc., can be implemented by roadside equipment instead of in the vehicle. Through examples, describe the solutions implemented in the vehicle.
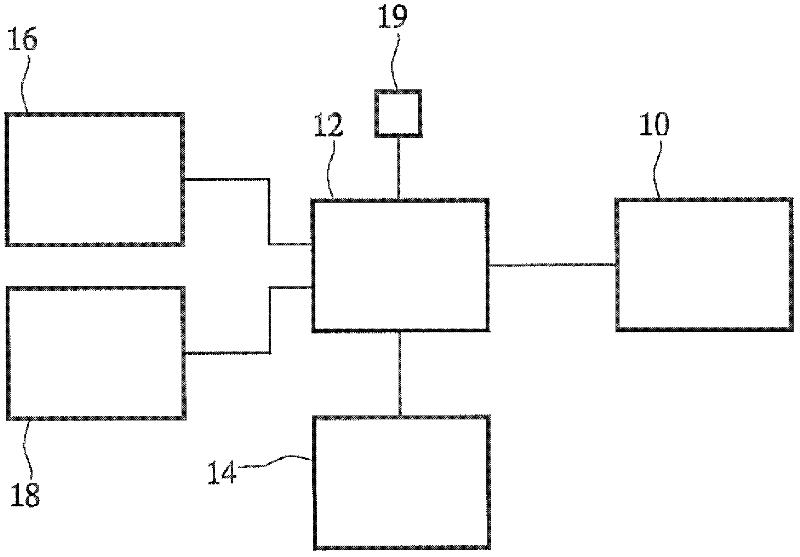
[0024] figure 1 An example of a collision avoidance system in a vehicle (such as a car) is shown. The collision avoidance system includes an object detector 10, a data processor 12, a map storage device 14, a position detector 16, a speed detector 18, and an alarm Signal generator 19. The data processor 12 is connected to the target detector 10, the map storage device 14, the position detector 16, the speed detector 18, and the alarm signal generator 19.
[0025] The target detector 10 may be configured to detect the position and speed of other vehicle...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap