

Control method for localization and navigation of mobile robot and mobile robot using same
A mobile robot and control method technology, applied in the field of mobile robots, can solve problems such as not recommending an adaptive drive control method and not being able to achieve performance, so as to achieve the effect of reducing the error recognition rate, reducing the amount of calculation, and improving the recognition rate of feature points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Hereinafter, exemplary embodiments of the present invention will be described with reference to the accompanying drawings. In the drawings, reference numbers refer to the same or equivalent parts of the present invention throughout the several figures. Also, in the description of the present invention, if it is determined that the detailed description of the structure or function of the related art is not necessarily derived from the spirit of the present invention, the detailed description of the related art is omitted. Hereinafter, preferred embodiments of the present invention will be described. However, the technical idea is not limited thereto but can be modified by those skilled in the art.
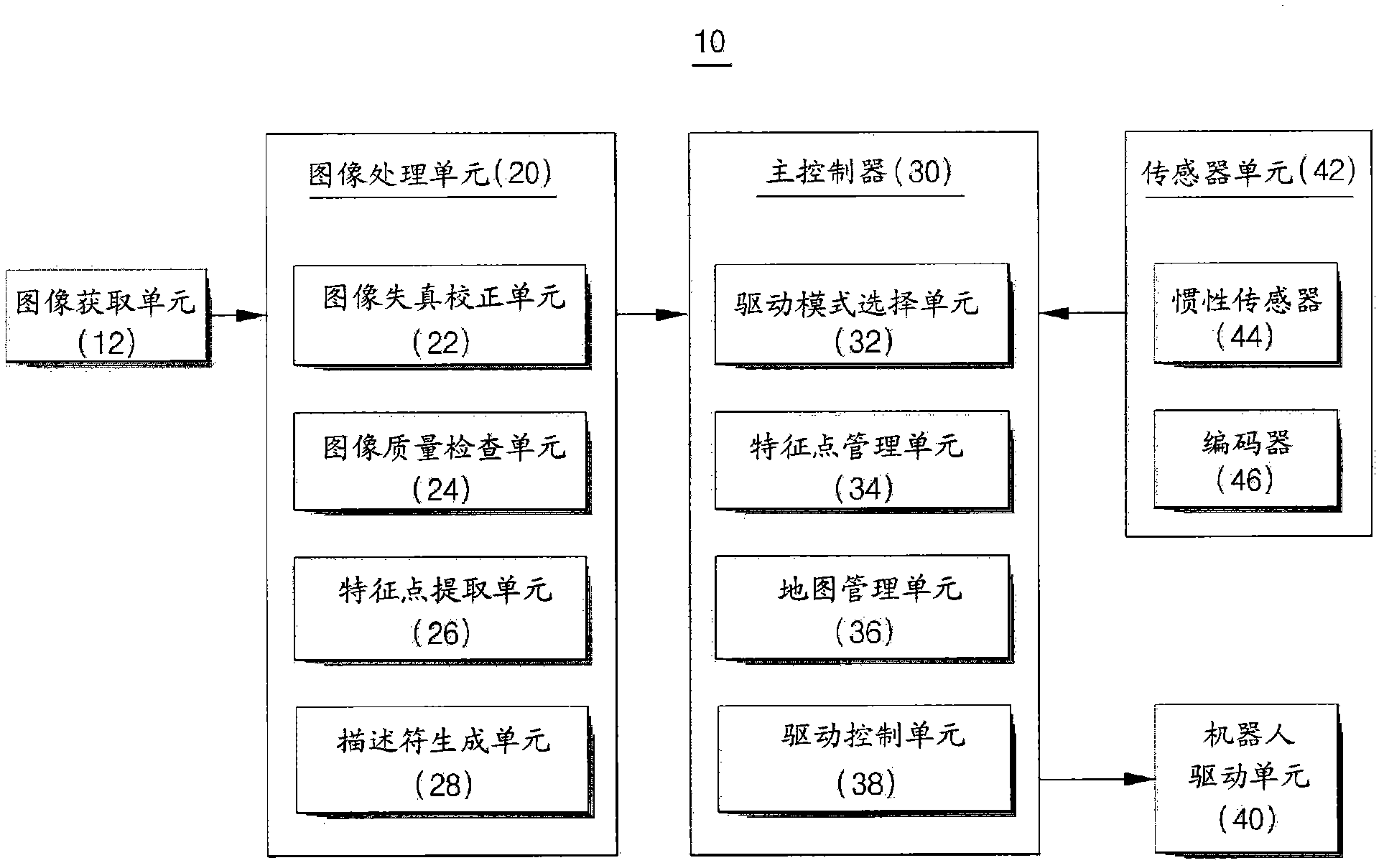
[0044] figure 1 is a block diagram showing the structure of a mobile robot according to an exemplary embodiment of the present invention.
[0045] The mobile robot 10 according to an exemplary embodiment of the present invention includes: an image acquisition unit 12 confi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More