

Reading method of round-like pointer instrument used for mobile robot
A mobile robot and instrument reading technology, which is applied to instruments, computer components, character and pattern recognition, etc., can solve the problems of unrobust dial search, inability to achieve accurate instrument positioning, and heavy workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
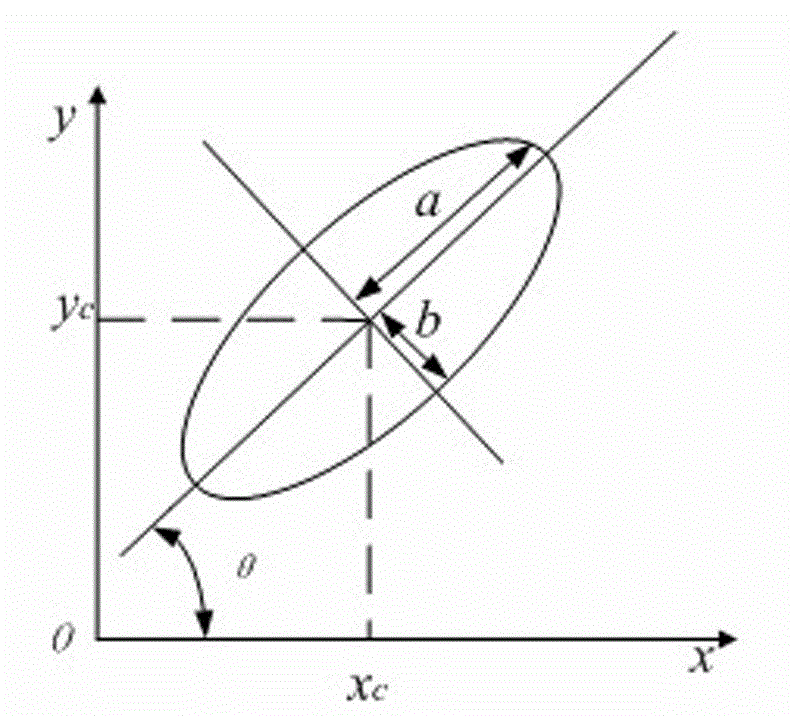
[0026] A method for automatic reading of a pointer instrument on a mobile robot. First, a template library should be established, and an inspection route should be set according to the inspection object of the mobile robot, and the target pointer instrument on the inspection object should be collected in a single sheet. Device images are added to the template library. Manually extract the template of the target instrument, mark the corresponding relationship between the scale and angle of the target instrument, and store it in the database. Further, it can represent instruments with uniform and non-uniform scale types to match the relationship between different pointer angles and readings.
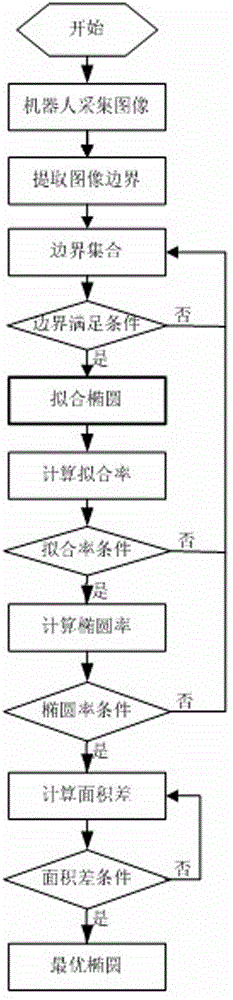
[0027] After the template is generated, the reading operation can be performed on the corresponding pointer and instrument. The reading operation steps are as follows:
[0028] Step1: Input the image to be recognized, that is, collect the relevant image through the mobile robot and send it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More