

Nonlinear MIMO (multiple input multiple output) system-based decoupling control method and device
A multiple-input multiple-output, decoupling control technology, applied in the field of decoupling control methods and devices, can solve problems such as inability to meet control accuracy and control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
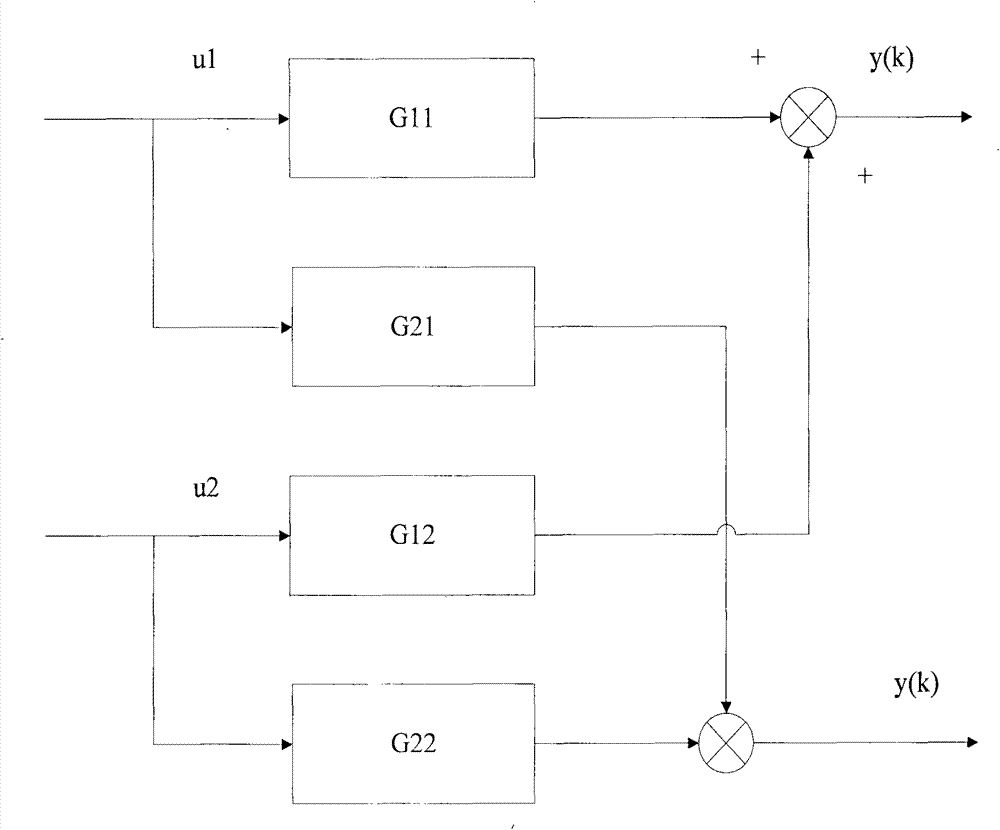
[0051] For a 2-input 2-output system, if the nonlinear system Σ 1 transfer function can be used Σ 1 : G ( s ) = G 11 G 12 G 21 G 22 , The input is U=[u 1 u 2 ] T , the output is Y=[y 1 the y 2 ] T , and its coupling is as figure 1 shown, then the inverse system of the system Σ 2 : g ( s ) = g 11 ...
Embodiment 2
[0053] In this embodiment, the implementation of the neural network inverse model is described. Proceed as follows:
[0054] (1) Determine the structure of the neural network inverse model;
[0055] (2) Obtain training samples of the neural network;
[0056] Determine the appropriate sampling frequency and amount of sampled data. let f s is the sampling frequency, τ s is the sampling time, and N is the number of samples sampled. The maximum frequency that can be covered in the sampled data is ω max = 2π·f s / 2=π / τ s ; The frequency resolution (minimum frequency) in the sampled data is ω min =2π·(f s / 2) / (N / 2)=2π / Nτ s . According to the actual requirements of the system, ω can be determined max and ω min , so as to determine τ s and N, to preprocess the sample data and eliminate bad data.
[0057] (3) The construction of the training sample set of neural network;
[0058] The sampling and preprocessed results are combined into neural network training samples to fo...
Embodiment 3
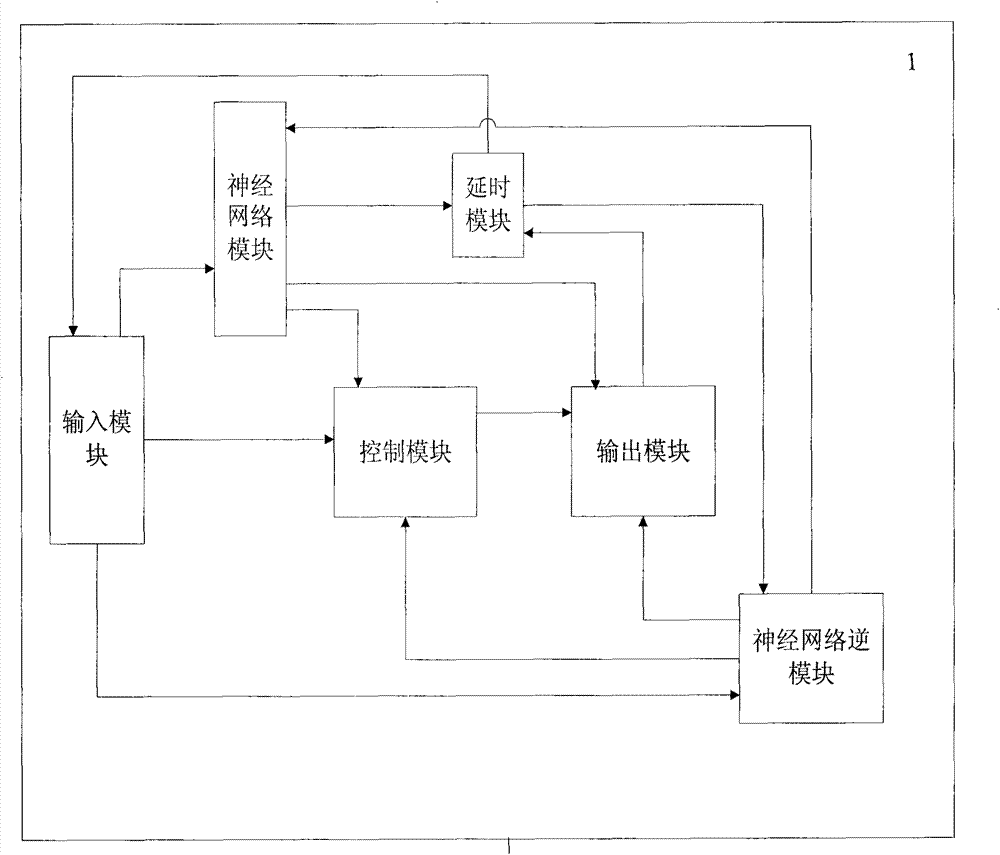
[0098] like figure 2 As shown, it is a decoupling control device based on a nonlinear multiple-input multiple-output MIMO system consistent with the present invention, such as figure 2 1 is the decoupling control device.
[0099] The input module is used to receive input signals, and is also used to generate sampling signals for the neural network module and the neural network inverse module;
[0100] A neural network module, which is used to construct a neural network model;
[0101] A neural network inverse module, which is used to construct a neural network inverse model;
[0102] A control module, which is used to generate a control signal to perform decoupling control on the controlled object;
[0103] The delay module is used to delay the signal.
[0104] Wherein, the input signal is input to the neural network inverse module;
[0105] Inputting the output signal of the neural network inverse module into the control module and the neural network module;
[0106] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More