

High-resolution depth map acquisition method based on active and passive fusion
A high-resolution, acquisition method technology, applied in the field of computer graphics processing, can solve the problems of unobtainable effect, limited depth measurement range, low brightness sensitivity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0062] Sparsely upsample the TOF low-resolution depth map first, without introducing human error; then, using the complementary characteristics between the stereo matching method and the TOF depth acquisition method, in the weak texture area and repeated texture area, the TOF camera is used. Depth acquisition results, while depth acquisition results using stereo matching algorithms in complex texture areas.
[0063] Specific steps are as follows:
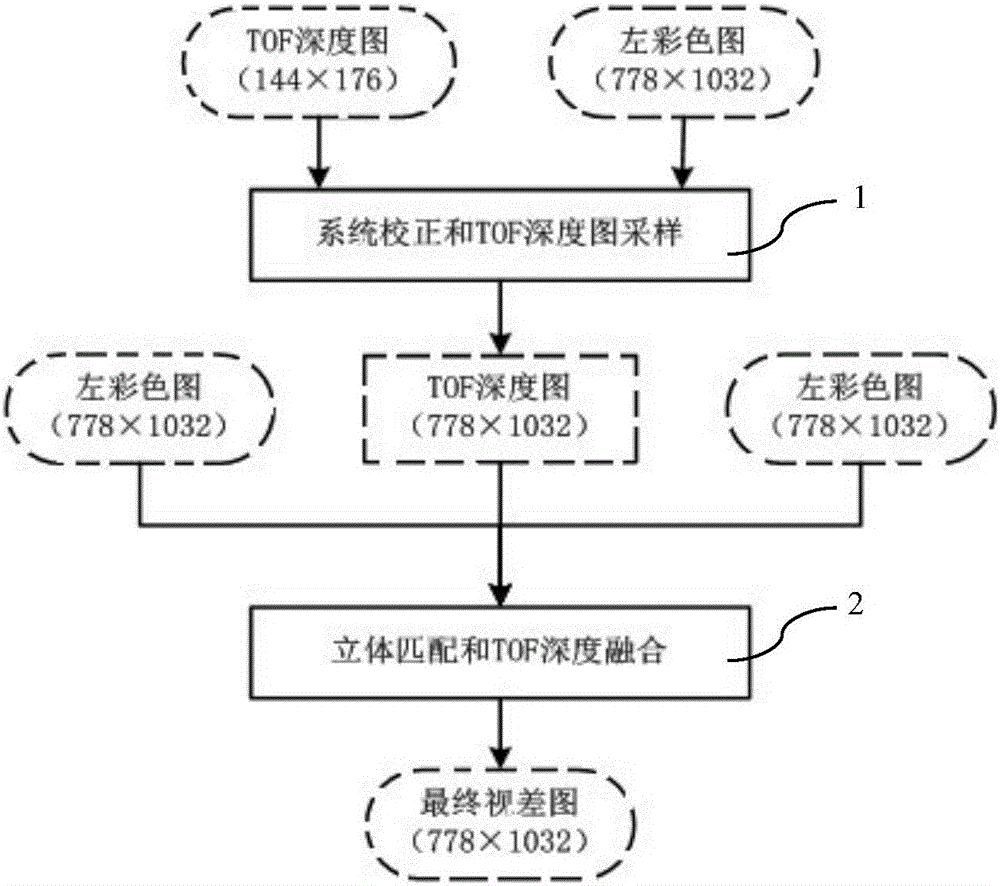
[0064] Step 1. System correction and sampling of TOF depth map, including sparse upsampling of TOF depth map and calculation of disparity map:
[0065] Since the resolution of the depth map acquired by the TOF camera is low (144×176), the TOF depth map is first sparsely up-sampled before the fusion of the TOF depth map and the depth map obtained by stereo matching...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More