

Gait of precise positioning of three-steering engine hexapod robot
A hexapod robot and robot technology, which is used in motor vehicles, transportation and packaging, etc., can solve the problems of rigid body resistance, unstable walking, and inability to calculate the amount of movement, and achieve the effect of precise positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
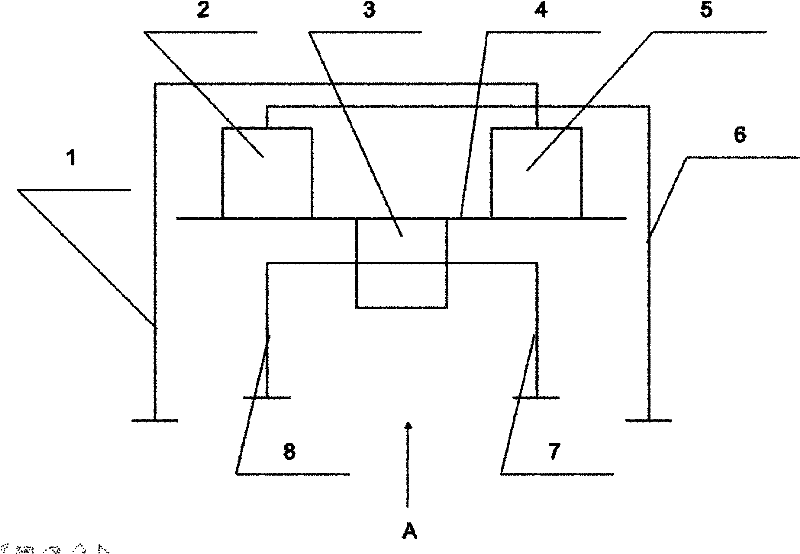
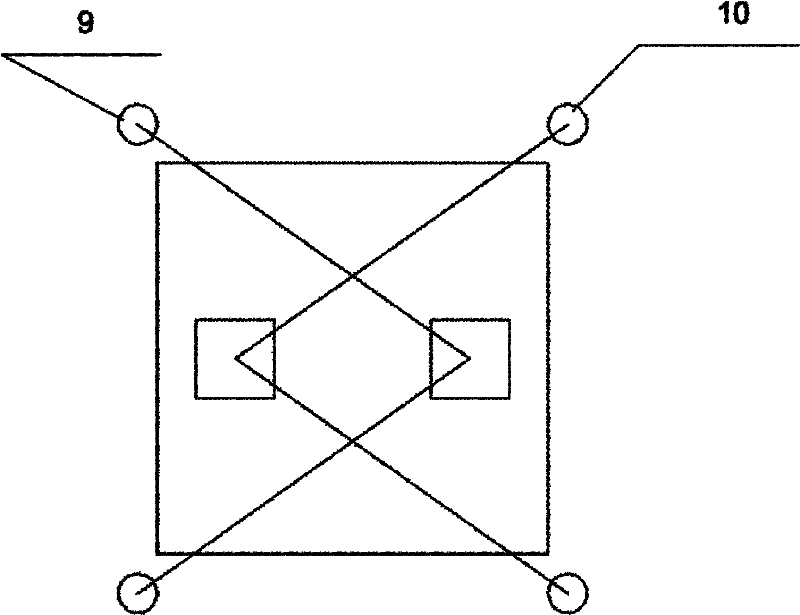
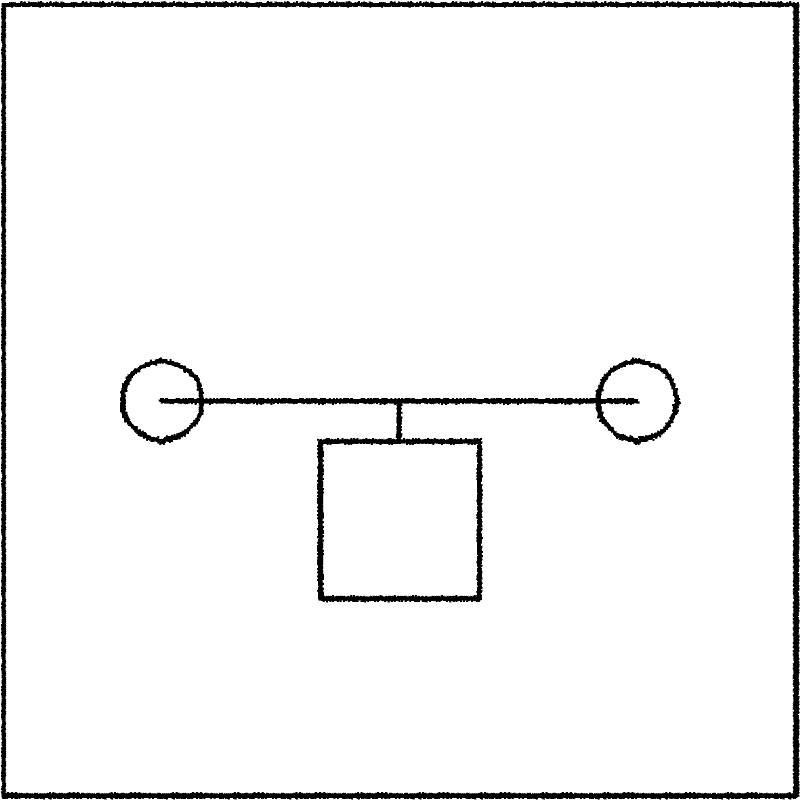
[0016] See first Figure 1 to 3 , The body of the hexapod robot with three steering gears is represented by 4. The middle motor 3 is in the middle of the bottom of the main body 4 and controls the connecting rod connecting the left middle foot 8 and the right middle foot 7. The left motor 2 is on the upper left side of the main body, and the connection line with the left midfoot landing point is perpendicular to the ground, and is connected and simultaneously controls the right front foot 10 and the right rear foot 6. The right motor 5 is on the upper right side of the main body, and the connection line with the right midfoot landing point is perpendicular to the ground, and is connected and simultaneously controls the left front foot 9 and the left rear foot 1.
[0017] Forward: Controlled by the middle motor 3, the left middle foot 8 touches the ground and the right middle foot 7 is raised. At this time, under the rotation of the middle motor 3, the left front foot 9 and the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More