

Robot system having error detection function of robot and control method thereof
一种机器人系统、控制方法的技术,应用在机器人系统领域,能够解决无法精度地检测碰撞等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
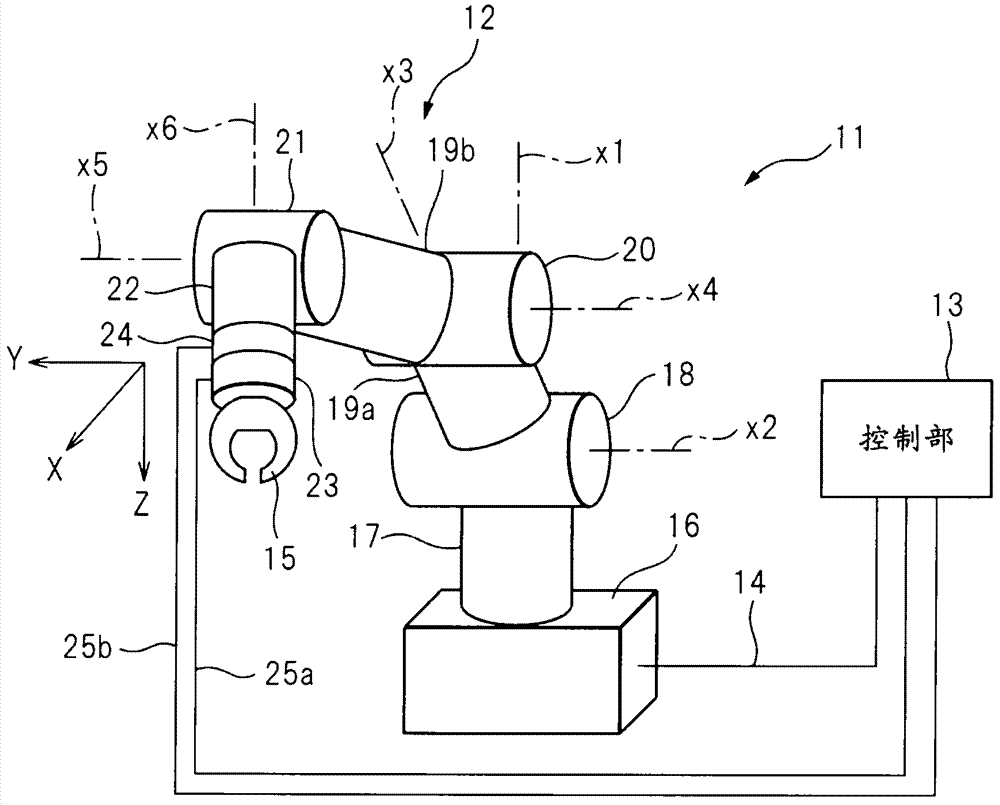
[0028] One embodiment of the present invention will be described below with reference to the drawings. figure 1 It is a figure which schematically shows the structure of the robot system 11 which concerns on 1st Embodiment of this invention. The robot system 11 includes, for example, an articulated robot 12 constituting a 6-axis vertical articulated robot, and a control unit 13 connected to the articulated robot 12 to control the operation of the articulated robot 12 . The articulated robot 12 and the control unit 13 are connected by a wire 14 . The articulated robot 12 has a manipulator 15 as a working tool. The robot arm 15 can grip a workpiece, for example. The articulated robot 12 is placed, for example, in a space where the articulated robot 12 cooperates with humans.
[0029] The articulated robot 12 has: for example, a base 16 fixed on the ground; for example, a base end arm 17 rotatably connected to the base 16 around a rotation axis x1 perpendicular to the ground; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More