Moving object detection system
A technology for moving objects and detection systems, which can be used in radio wave measurement systems, collision avoidance systems, traffic control systems, etc., and can solve problems such as misidentification of multiple reflection points.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
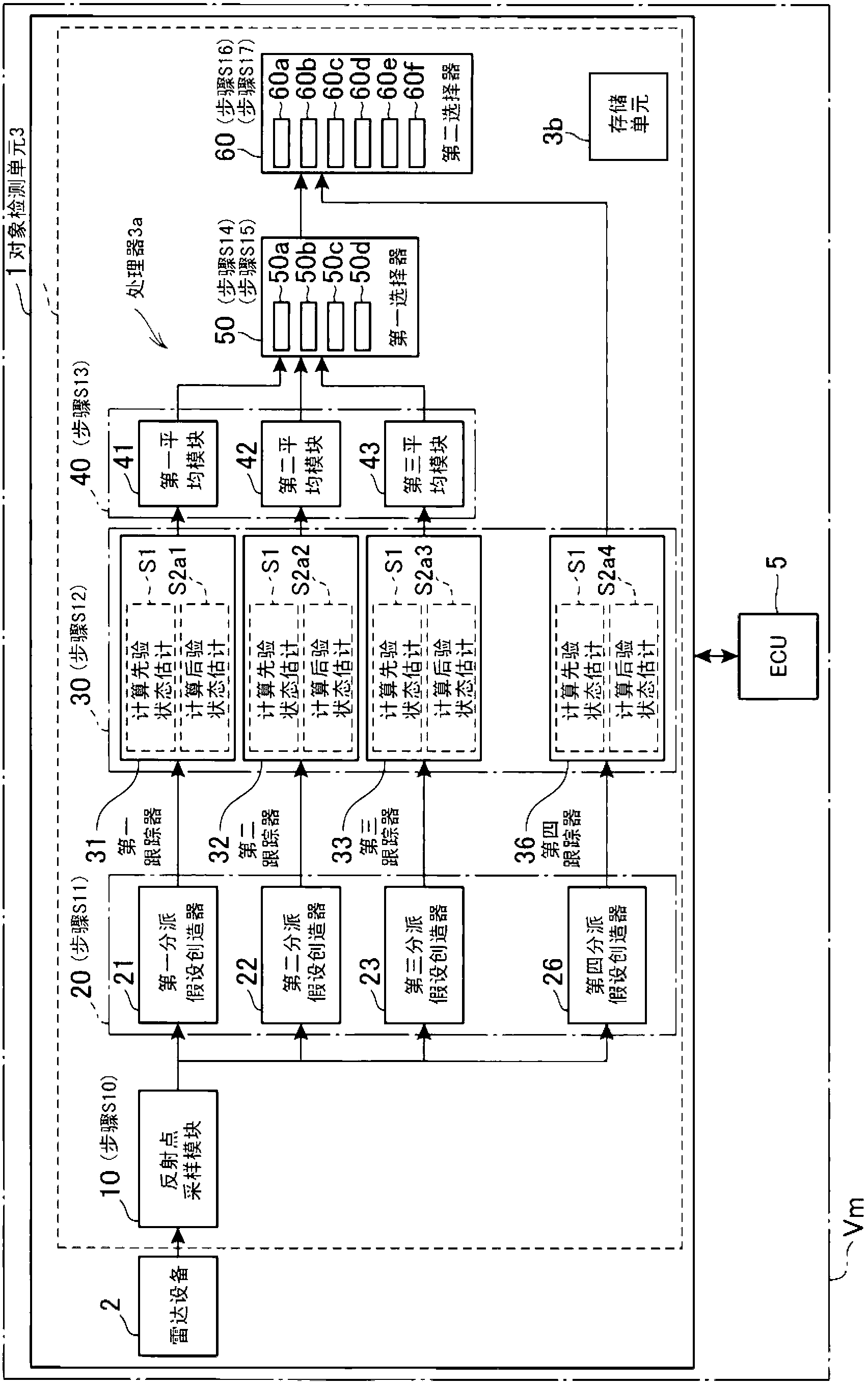
[0053] figure 1 An example of the overall structure of the moving object detection system 1 according to the first embodiment of the present disclosure is shown in . The moving object detection system 1 and the ECU 5 are installed in a motor vehicle (vehicle) Vm. The moving object detection system 1 is communicably connected to the ECU 5 and includes a radar device 2 and an object detection unit 3 . The radar device 2 is communicably connected to the detection unit 3 .
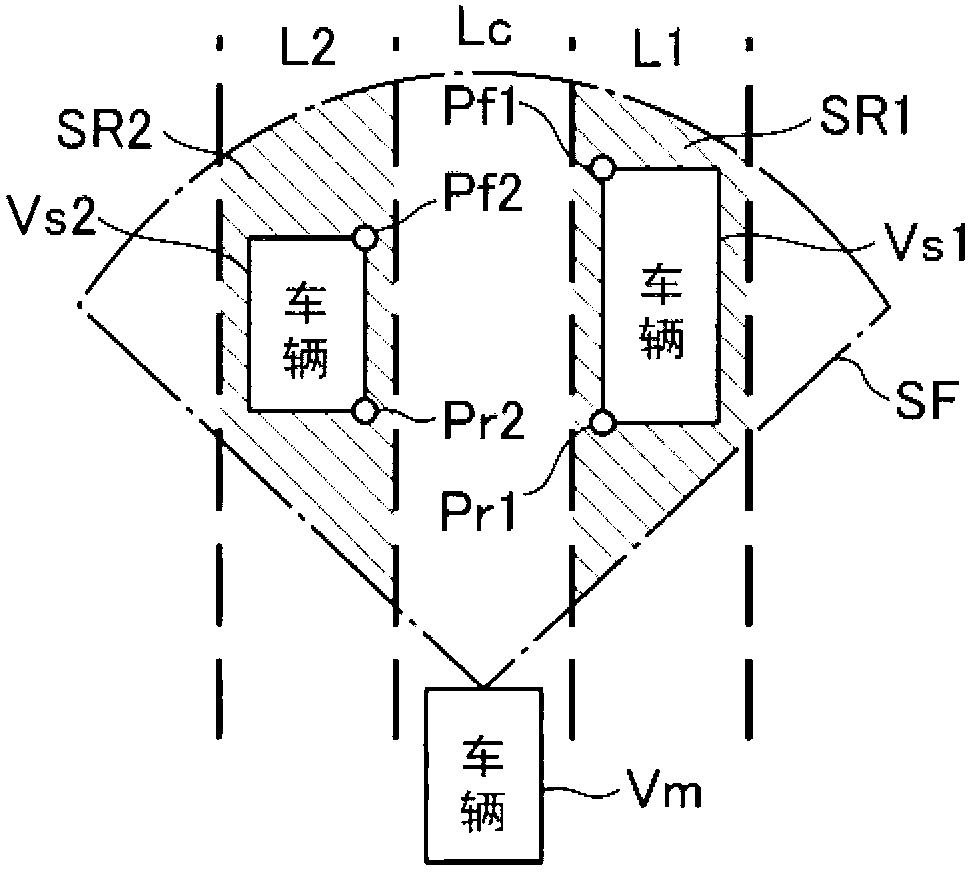
[0054] The radar device 2 is placed on, for example, the front end (head) of the vehicle Vm. The radar device 2 is designed to transmit millimeter radio waves as search waves via a transmitting antenna in the forward direction of the vehicle Vm corresponding to the vehicle traveling direction. The radar device 2 is designed to search for a predetermined scan field SF by scanning the scan field SF using radio waves. The scan field SF extends from the radar device 2 of the vehicle Vm in the form of, for exam...
no. 2 example
[0219] will be referred to below Figure 5A A moving object detection system 1A according to a second embodiment of the present disclosure is described.
[0220] The structure and / or function of the moving object detection system 1A according to the second embodiment differs from the moving object detection system 1 in the following points. Therefore, different points will be mainly described below.
[0221] The mobile object detection system 1A includes a radar device 2 and an object detection unit 3A communicably connected thereto.
[0222]The object detection unit 3A comprises a reflection point sampling module 10 , an assignment hypothesis creator 25 , a fourth assignment hypothesis creator 26 , a tracker 35 , a fourth tracker 36 , an averaging module 45 and a selector 61 .
[0223] The assignment hypothesis creator 25 is operatively connected to the reflection point sampling module 10 and is designed to create an assignment hypothesis under an average model of the dynam...
no. 3 example
[0243] will be referred to below Figure 5B A moving object detection system 1B according to a third embodiment of the present disclosure is described.
[0244] The structure and / or function of the moving object detection system 1B according to the third embodiment differs from the moving object detection system 1 in the following points. Therefore, different points will be mainly described below.
[0245] The mobile object detection system 1B includes a radar device 2 and an object detection unit 3B communicably connected thereto.
[0246] The object detection unit 3B includes a reflection point sampling module 10 , an assignment hypothesis creator 25 , a fourth assignment hypothesis creator 26 , a fourth tracker 36 and a selector 62 .
[0247] The selector 62 is operatively connected to the fourth tracker 36 .
[0248] The selector 62 is designed to perform the following routine to determine the fourth model M based on the kth sample 0 The posterior state estimate x k|k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More