

An anthropomorphic 6-DOF robot gravity balance method
A gravity balance, robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of good static transparency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] An anthropomorphic six-degree-of-freedom robot gravity balance method of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
[0037] A kind of anthropomorphic 6-DOF robot gravity balance method of the present invention comprises the following steps:
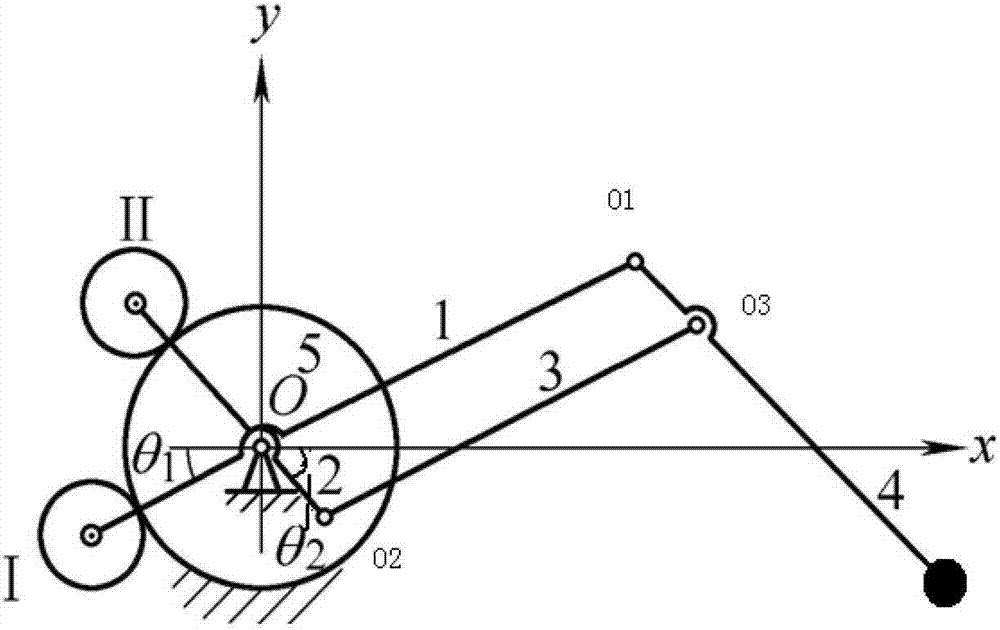
[0038] 1) The entire 6-DOF main-hand robot is set up in an anthropomorphic arrangement, and the first joint axis of the 6-DOF main-hand robot is arranged vertically, so that the first joint does not rotate vertically under the action of gravity. rotary motion of the axis;
[0039] 2) The three joint mechanisms of the wrist are arranged in the center of the wrist, and the center of mass of the wrist mechanism is located at the center of the wrist and intersects with the forearm rod at a certain point through symmetrical design or counterweight design;
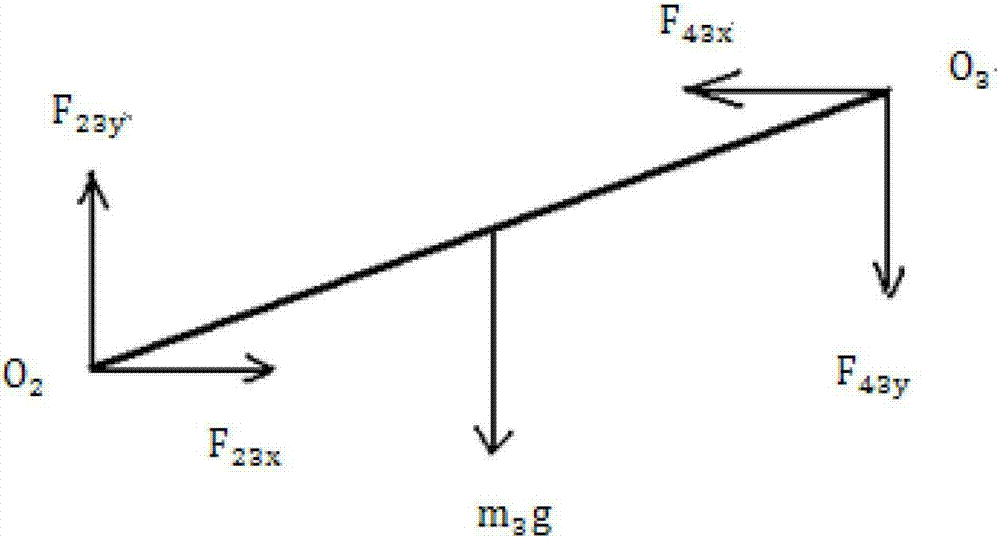
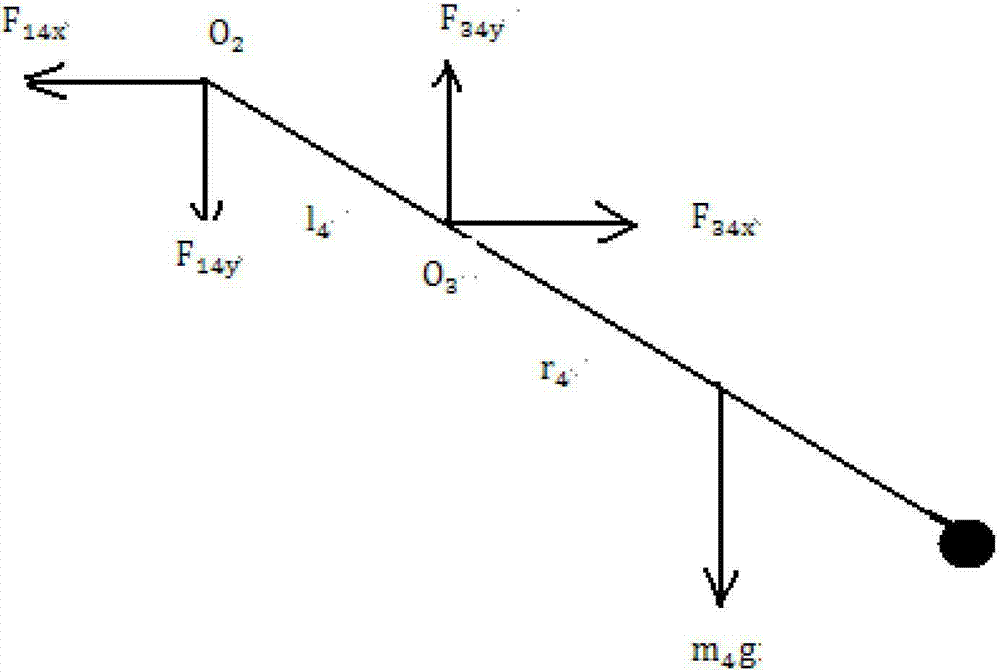
[0040] Firstly, the gravity balance design of the three joint mechanisms of the wrist is realized throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More