

Split Upper Body Walking Device
A walking device and upper body technology, applied in the field of walking equipment, can solve problems such as insufficient control of horizontal walking balance, and achieve the effects of improving walking stability and realizing gravity balance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
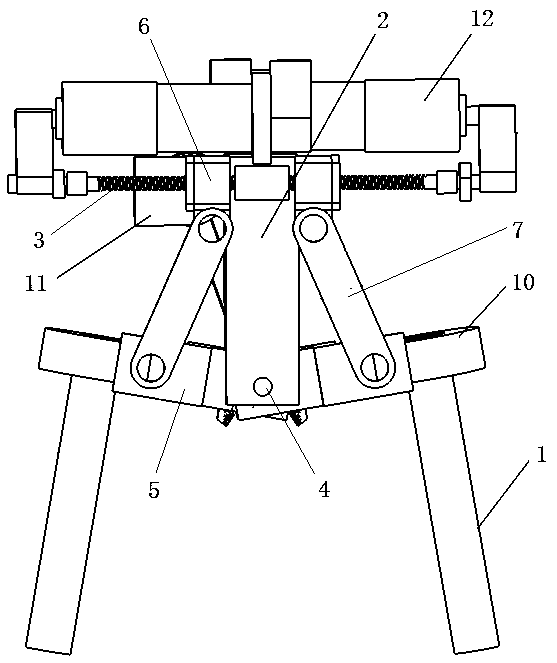
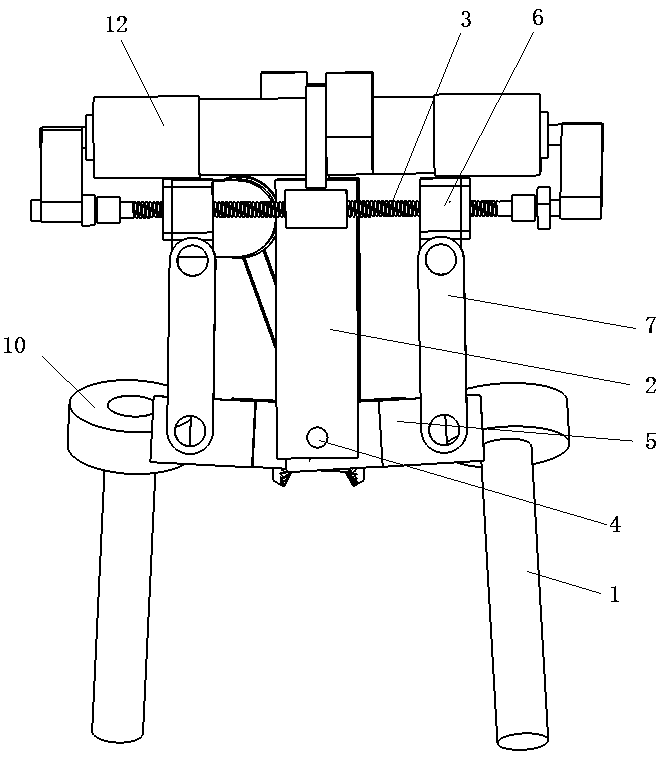
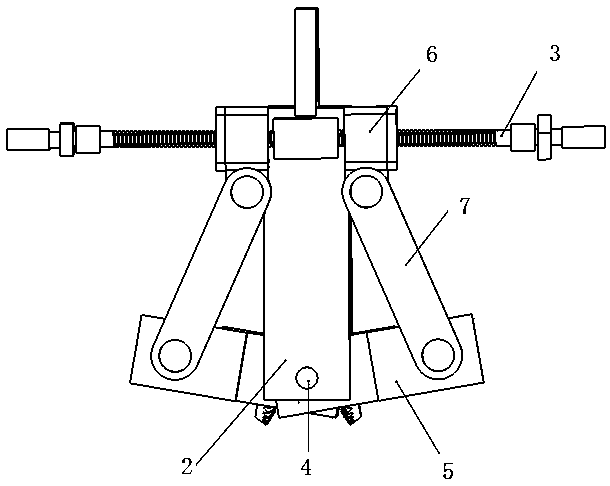
[0024] Such as figure 1 As shown, it is a schematic structural view of the embodiment of the bifurcated upper body walking device of the present invention when walking laterally. The bifurcated upper body walking device of the present embodiment includes hips and legs, the legs include two walking legs 1, the hips include a bracket 2, and the upper end of the bracket 2 is provided with a horizontal threaded screw rod 3 in cooperation with its rotation, and the bracket The lower end of 2 is provided with a main shaft 4 perpendicular to the screw rod 3 for its rotation, and the main shaft 4 is fitted with its rotation and fitted with connectors 5 respectively located on both sides o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More