

Three dimensional force feedback main operator assisting minimally invasive surgery robot
A surgical robot and minimally invasive surgery technology, applied in the field of main manipulator, can solve the problem of not using the main manipulator of microsurgery, and achieve the effect of light weight, good rigidity and small inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
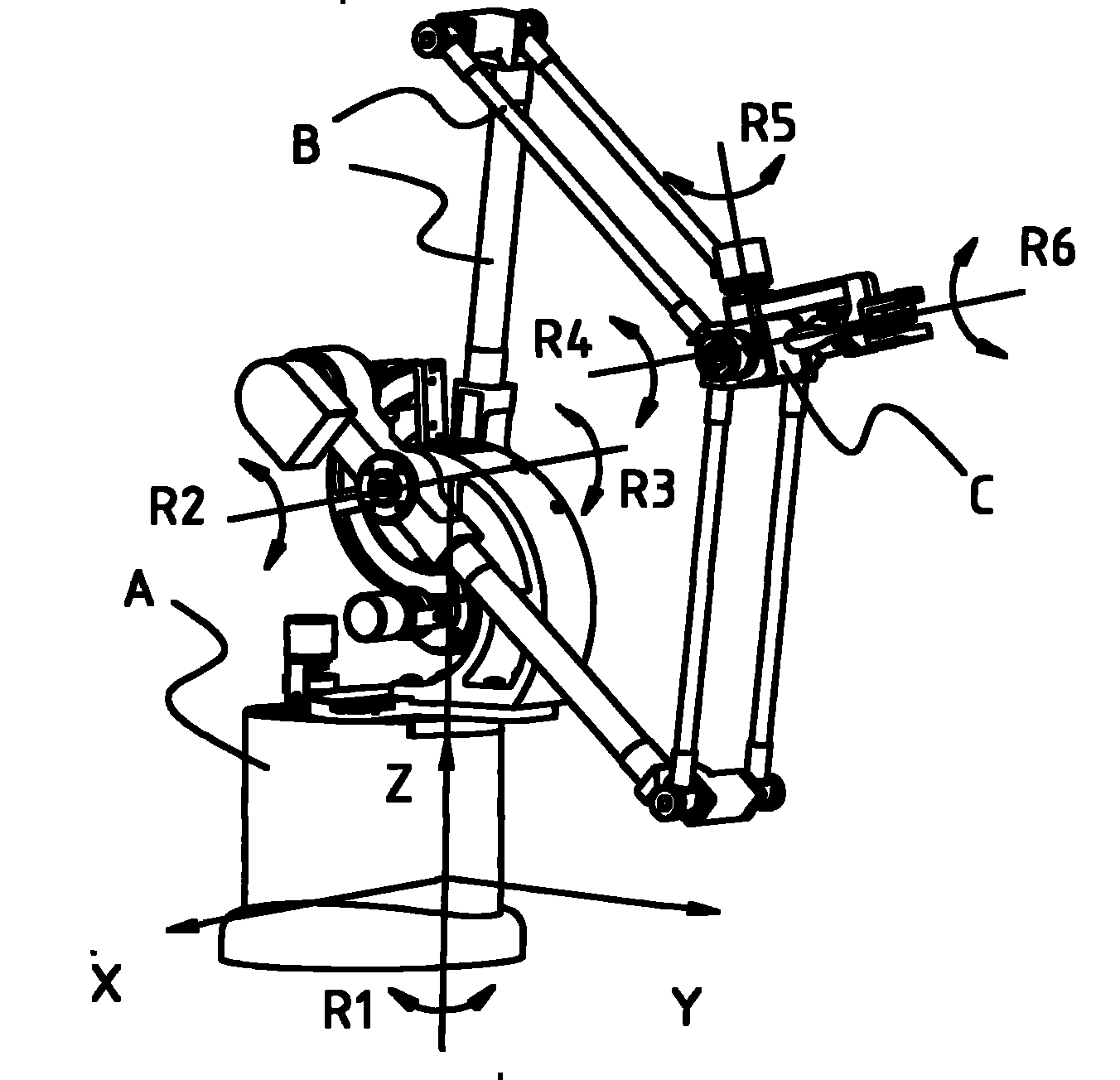
[0022] Such as figure 1 As shown, the three-dimensional force feedback main manipulator of the assisted minimally invasive surgical robot includes a base mechanism A, a four-bar linkage mechanism B, and a wrist mechanism C. The upper and lower near frame rods 16 rotate around the axes R2 and R3 respectively, so that the end of the four-bar linkage mechanism B, that is, the center of the wrist mechanism C, translates in the plane formed by the near frame rod 16 and the far frame rod 17, together with the four-link The rotational movement of the rod mechanism B around the axis R1 together realizes the movement of the center of the wrist mechanism C in three directions X, Y, Z in space. The wrist mechanism has three rotational degrees of freedom and the rotational axes R4, R5, R6 intersect at one point, together with the finger opening and clos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More