

Novel robot kinematics modeling method
A technology of robot kinematics and modeling methods, which is applied in the field of robot kinematics modeling and can solve problems such as cumbersome and complicated modeling methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
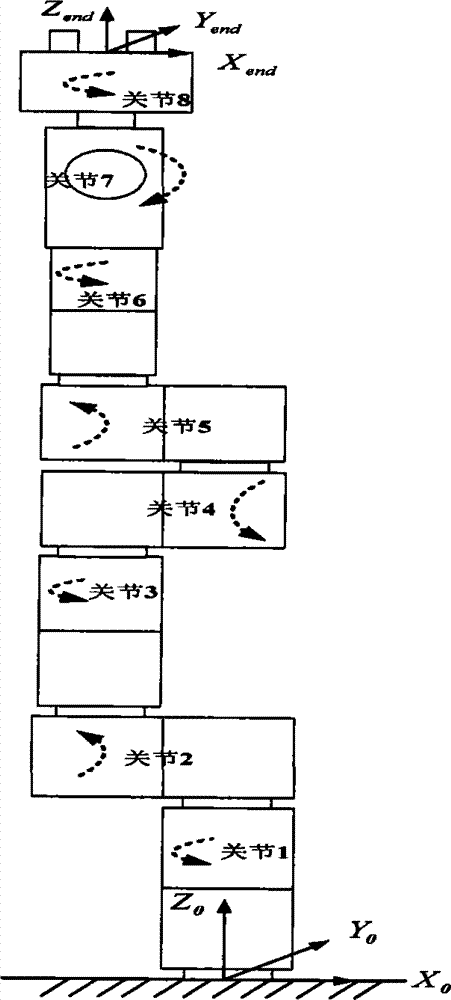
[0057] According to the robot kinematics modeling method established in the present invention, the 8-degree-of-freedom modular robot is used as the research object for verification.
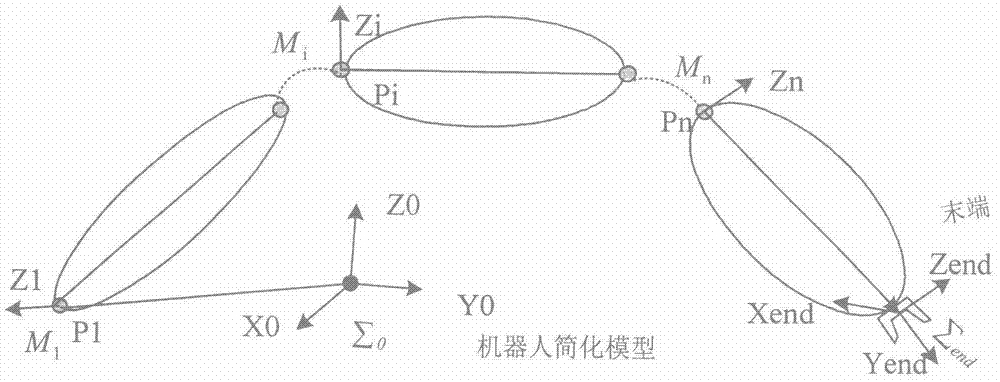
[0058] The modular robot includes 8 degrees of freedom, the structure is as Figure 2-A As shown, each degree of freedom of the robot is a rotational attribute. According to the proposed modeling method, the center of the robot root is first selected as the origin of the robot reference coordinate system, the Z axis of the reference system is perpendicular to the plane where the root is located, the X axis is perpendicular to the Z axis and horizontally to the right, and the Y axis is obtained from the Z axis and the X axis Determined based on the right-handed coordinate system. The origin of the end tool coordinate system is set at the center of the end of the robot, and its X, Y, and Z axes are selected to be in the same direction as the reference coordinate system's X, Y, and Z axes. The mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More