

Steering engine saturation resistant self-adaptive control method for ship courses
An adaptive control, anti-rudder technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the inconsistency of closed-loop control performance, inconsistency between the output rudder angle of the controller and the actual rudder angle, instability, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in more detail below in conjunction with accompanying drawing example:
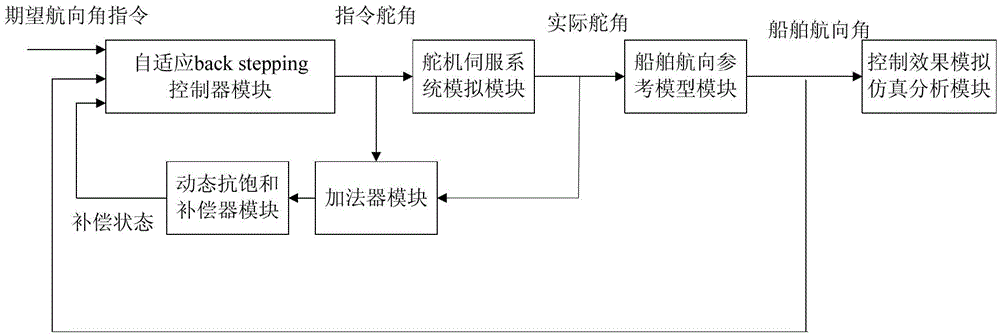
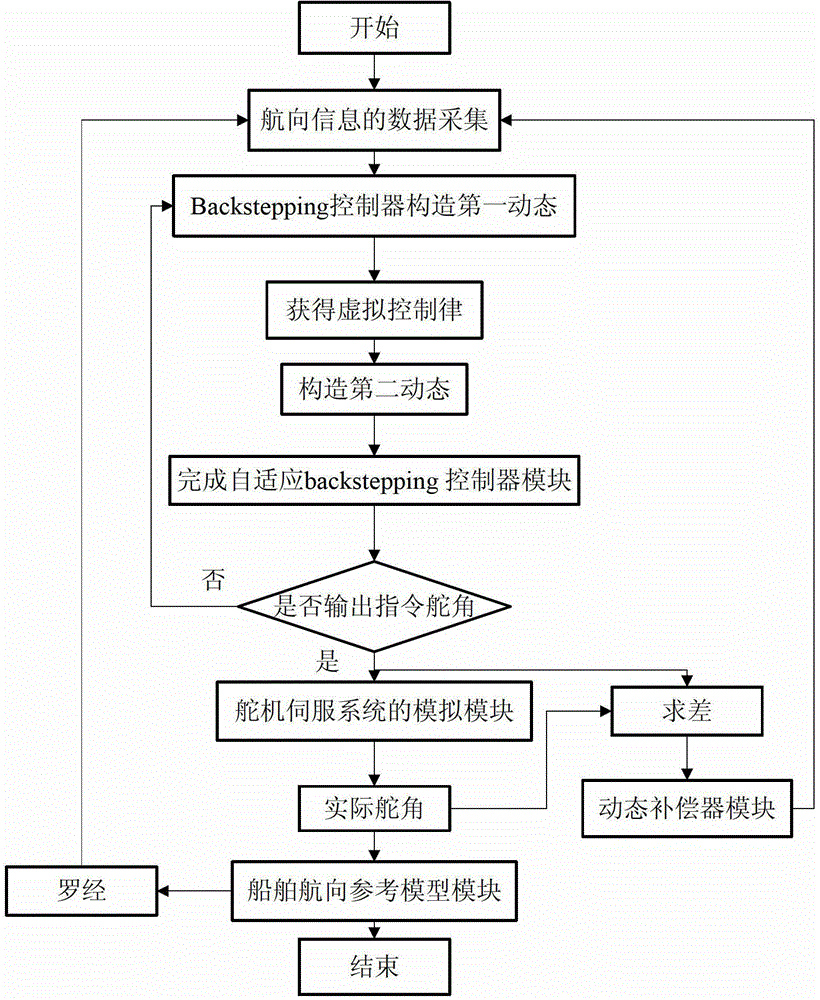
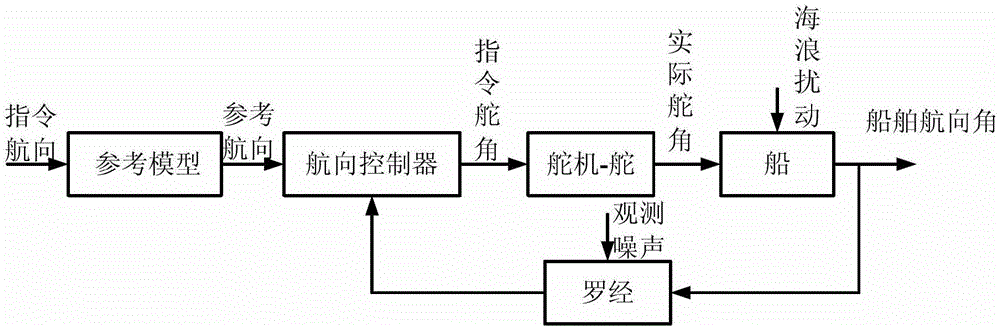
[0039] combine Figure 1~3 , the present invention includes dynamic anti-saturation compensator module, adaptive backstepping controller module, adder module, ship heading reference model module, steering gear servo system simulation module and control effect simulation analysis module six modules. The dynamic anti-saturation compensator module receives the output of the adder operation module; the adaptive backstepping controller module outputs the command rudder angle information; the simulation module of the steering gear servo system is a mathematical model of the actual steering gear of the ship, which has nonlinearities such as saturation dead zone characteristics; the adder module calculates the command rudder angle and the actual rudder angle information; the ship course reference model module has the model characteristics of the ship course movement, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More