

Single-leg robot in-place jumping mechanism with power energy storage function
A technology of power storage and robotics, applied in the field of robotics, can solve problems such as gaps, achieve good jumping characteristics, and improve the effect of safety protection levels
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Further illustrate the present invention below in conjunction with accompanying drawing.
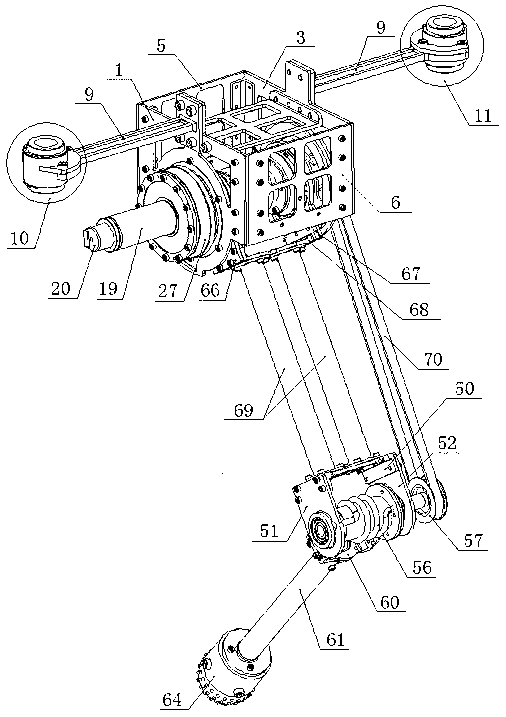
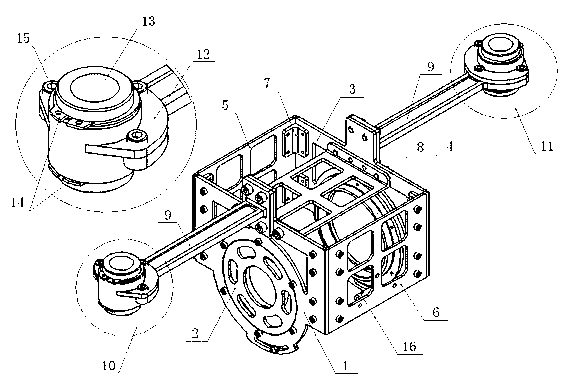
[0015]The in-situ jumping mechanism of the single-leg robot with power storage of the present invention is composed of five parts: a body, a hip joint, a knee joint, a sole, and a thigh and a thigh. The body and the thigh, and the thigh and the calf are respectively connected through the hip joint and the knee joint. The body part of robot is made up of body right side plate 1, right side plate flange 2, body left side plate 3, left side plate flange 4, body back plate 5, body front plate 6, body horizontal plate 8, first guiding mechanism 10 and the second guide mechanism 11, etc., the body right side plate 1, the body left side plate 3, the body back plate 5 and the body front plate 6 are formed by connecting eight straight-leg aluminum 7, and the horizontal plate 8 is connected on the right side of the body Between the plate 1 and the left plate 3 of the body, it is used to imp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More