

An autonomous vehicle obstacle avoidance method based on arc path generation
A technology for path generation and autonomous vehicles, which can be used in road network navigators, collision avoidance systems, etc., and can solve problems such as the inability to meet the requirements of four-wheel vehicle obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
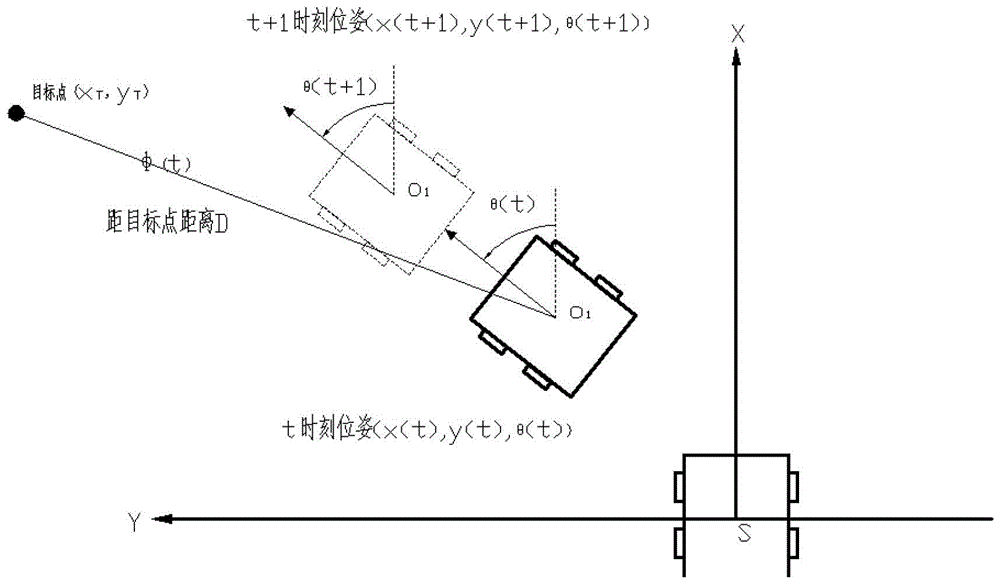
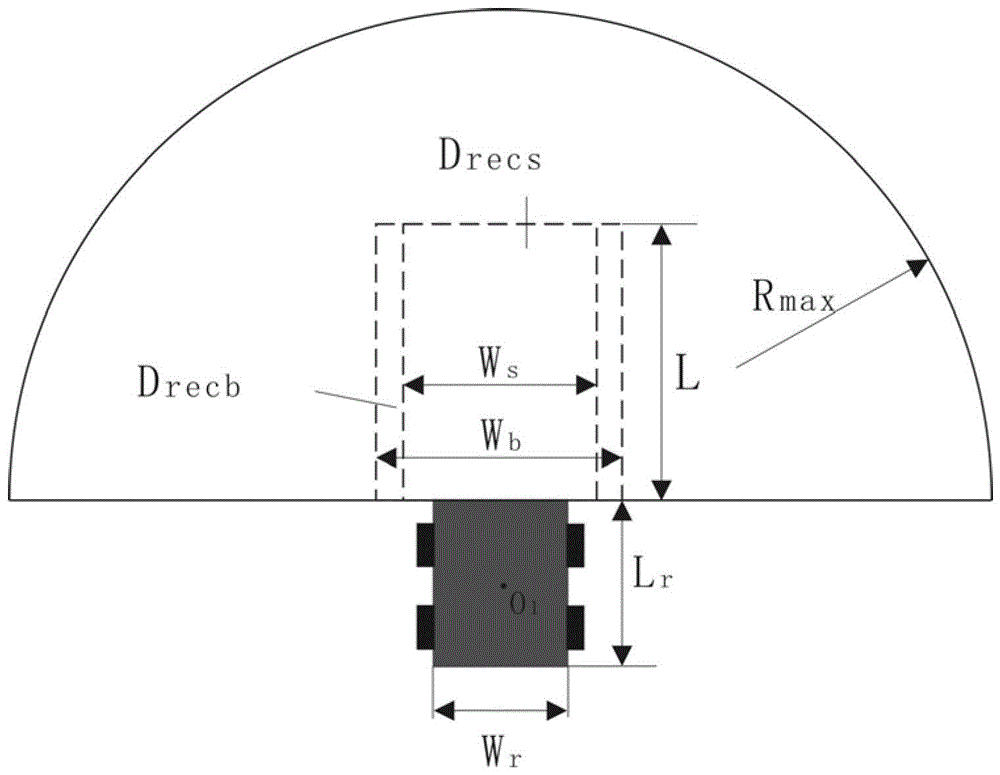
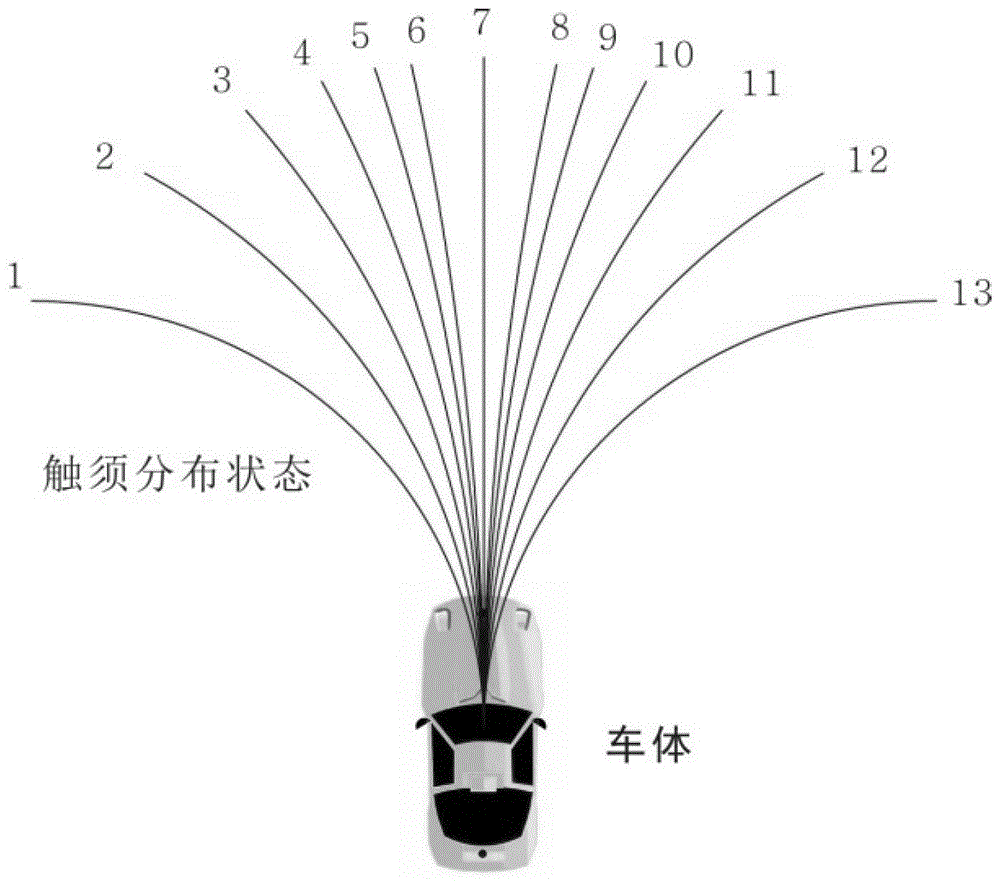
[0062] The autonomous vehicle obstacle avoidance method based on arc path generation in this embodiment includes the following steps: 1. Obtain the position of the vehicle at any time through the positioning system; 2. According to the measurement information of the detection sensor on the vehicle, determine a specific area within the detection range Whether there are obstacles inside and the distance between the vehicle and obstacles; 3. Add a turning route selection mechanism under "walking around obstacles", generate multiple arc candidate routes and determine the optimal obstacle avoidance based on obstacle information Driving route; 4. According to the distribution of obstacles, the vehicle can choose two modes of "going towards the target" or "walking around obstacles" to realize collision-free navigation of the target point in an unknown environment. Figure 9 The working principle flow chart of the present invention is given, and the specific implementation is described...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More