

Robot joint with power-off protection function and adjustable rigidity
A technology for robot joints and power-off protection, applied in the field of robots, can solve the problems of robot parts damage, increase in size of parts, increase in driving power, etc., and achieve the effects of fast response, increased service life, and overload prevention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
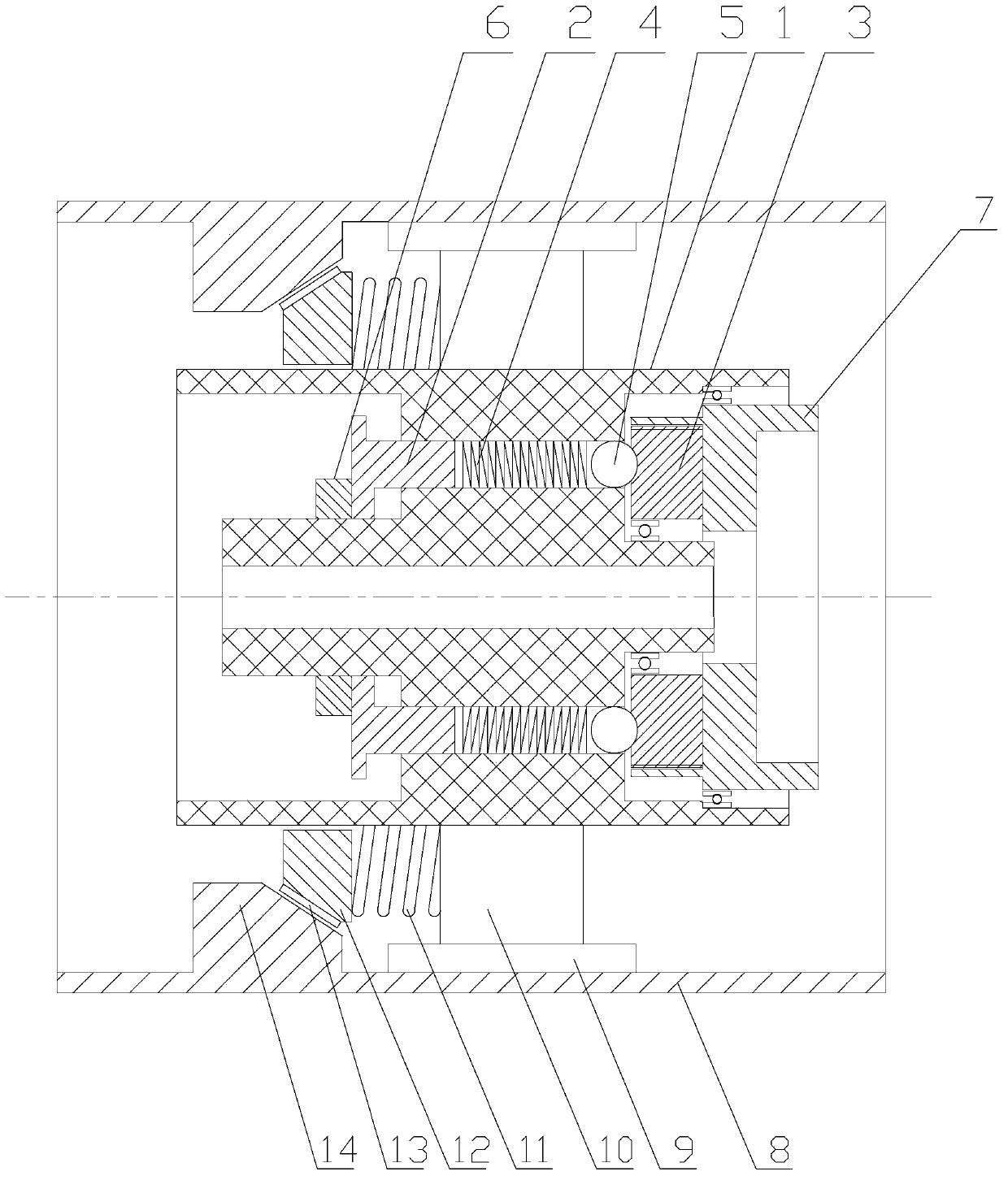
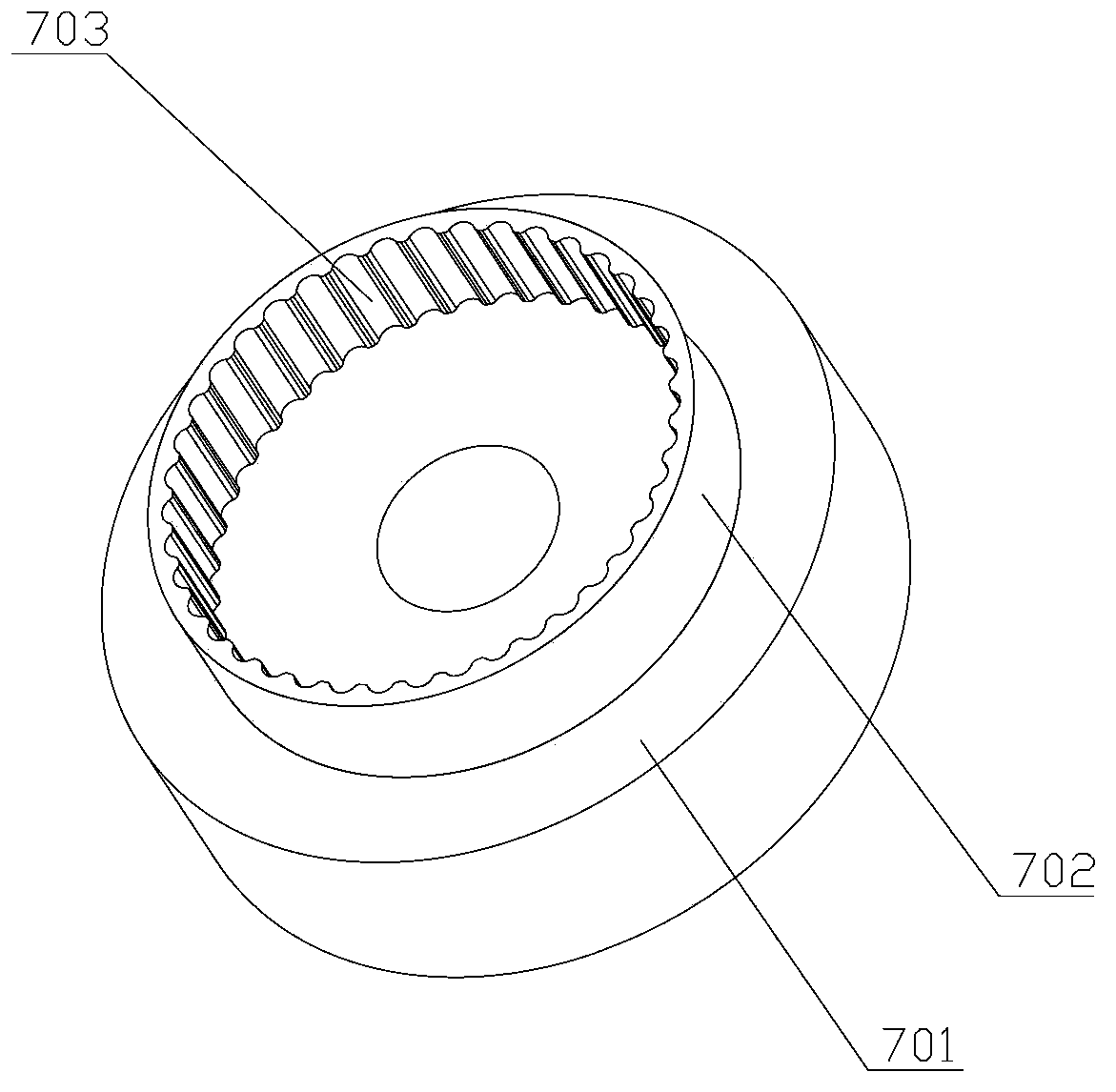
[0025] Such as Figure 1 to Figure 3 As shown, a robot joint with power-off protection function and adjustable stiffness includes a support structure 1, a spring pressure plate 2, a steel ball pressure plate 3, and a connecting plate 7;
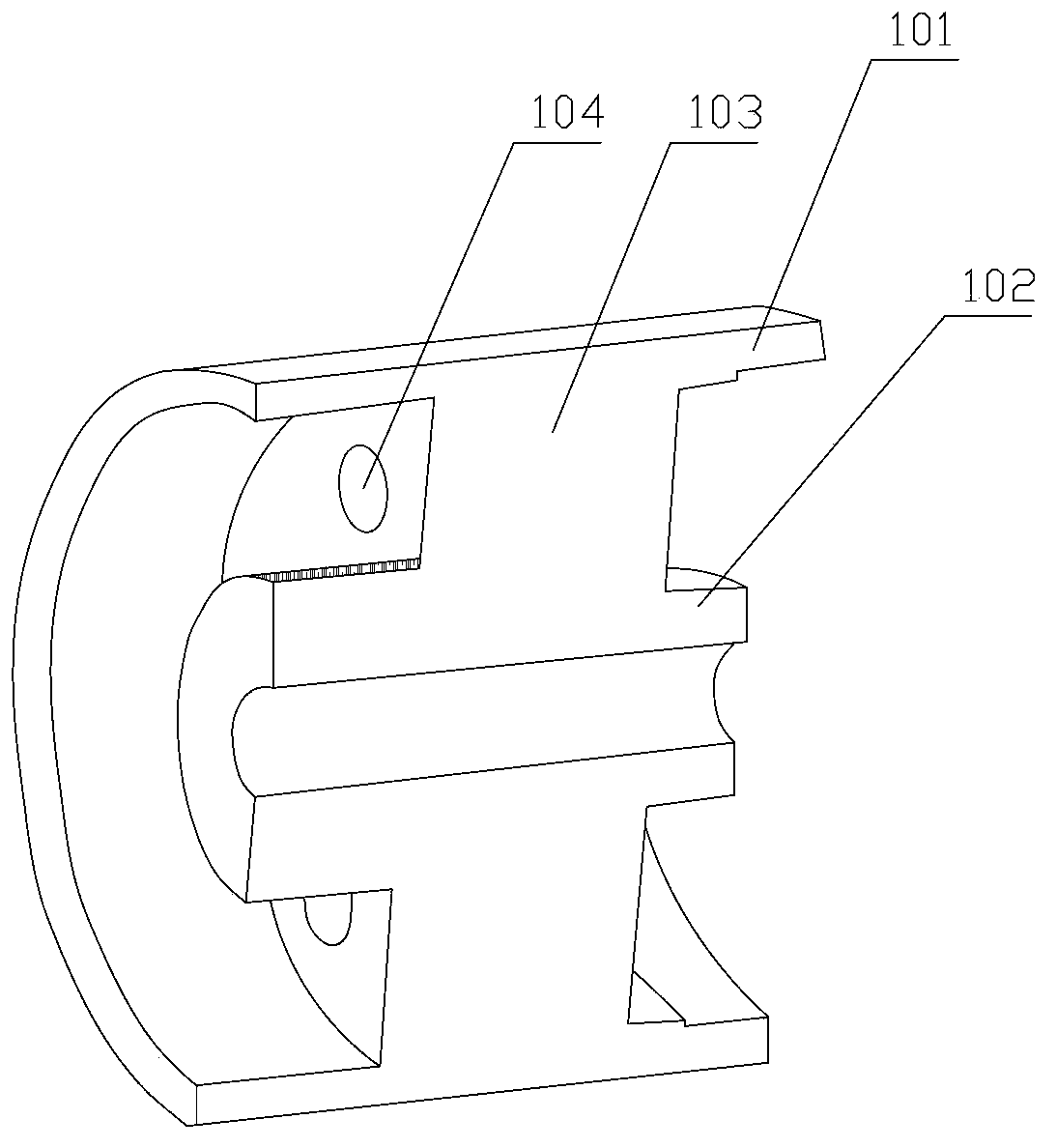
[0026] The supporting structure 1 includes an inner casing 101, a supporting shaft 102, and a supporting body 103 connecting the inner casing 101 and the supporting shaft 102. One end of the supporting shaft 102 is provided with an external thread, and the supporting body 103 is provided with a diameter A through hole 104 is provided in the through hole 104, and a spring 4 and a steel ball 5 connected with the spring 4 are arranged in the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More