

Multi-foot moving device based on combination driving mechanism
A hybrid drive and mobile device technology, applied in the field of bionic mobile platforms, can solve the problems of not having complex terrain adaptability, and achieve the effects of efficient gait swing, efficient walking and running, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
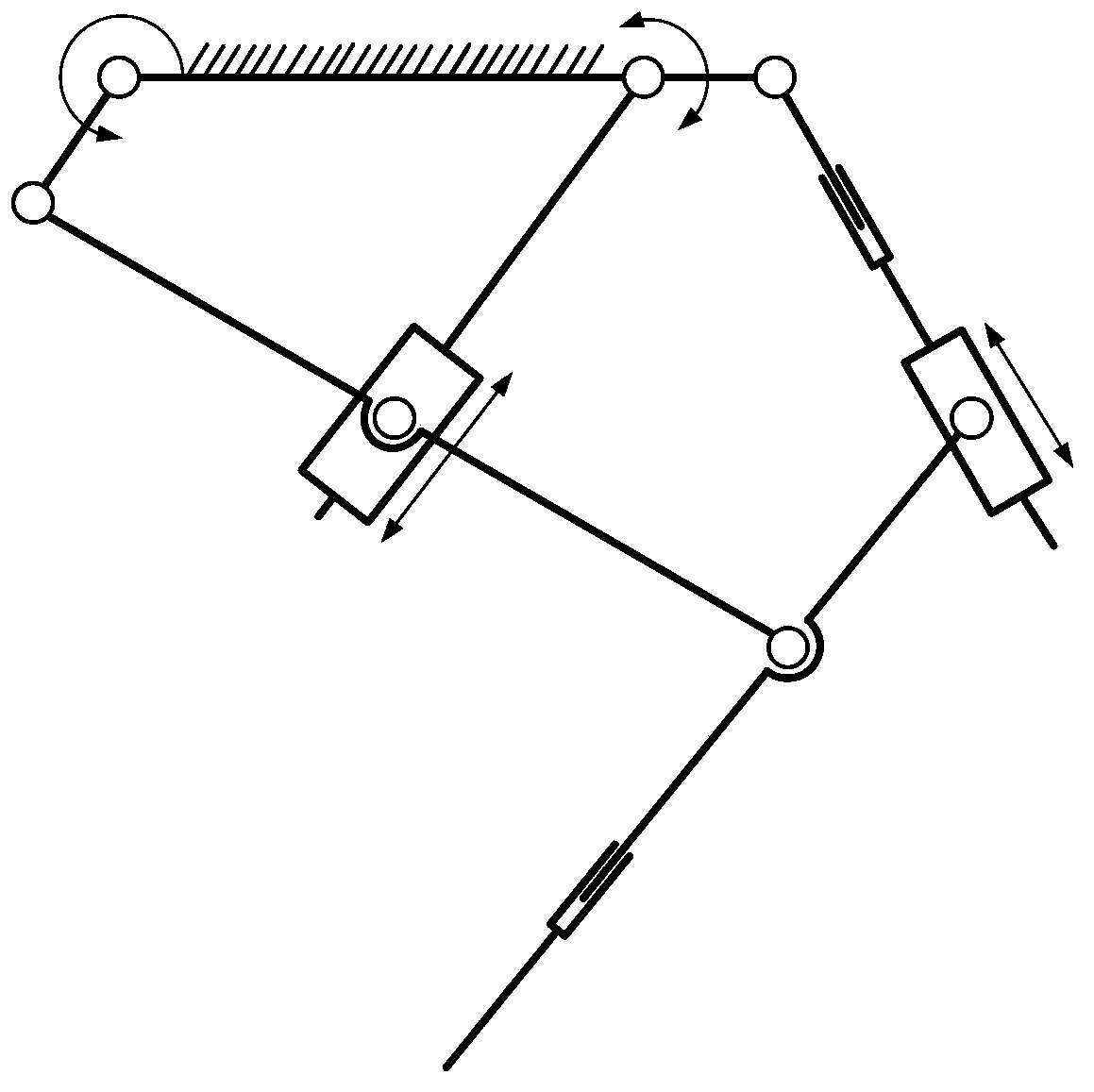
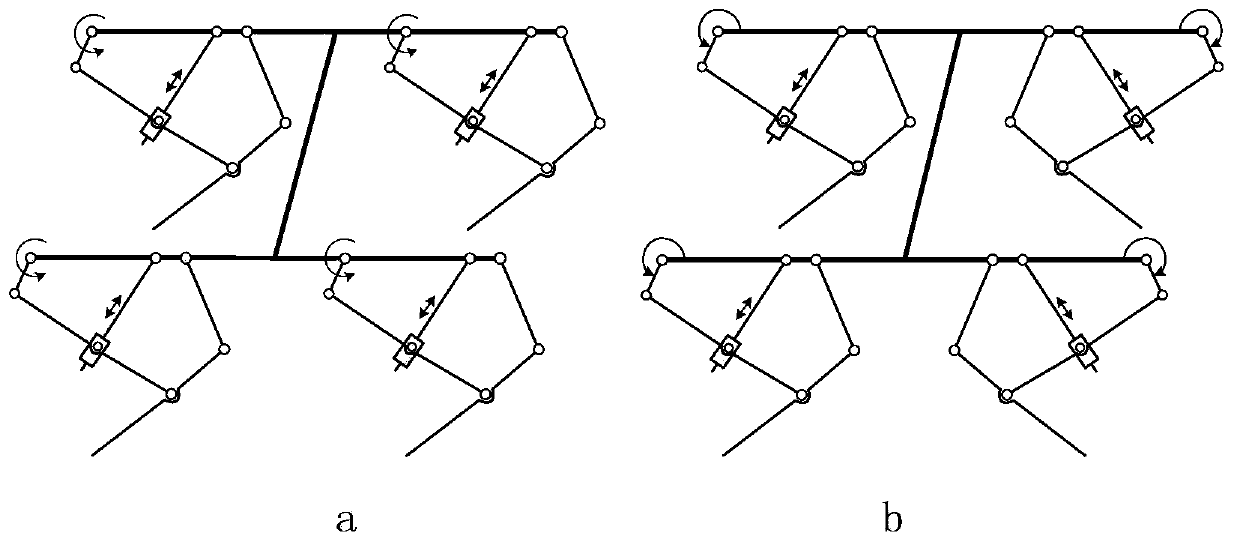
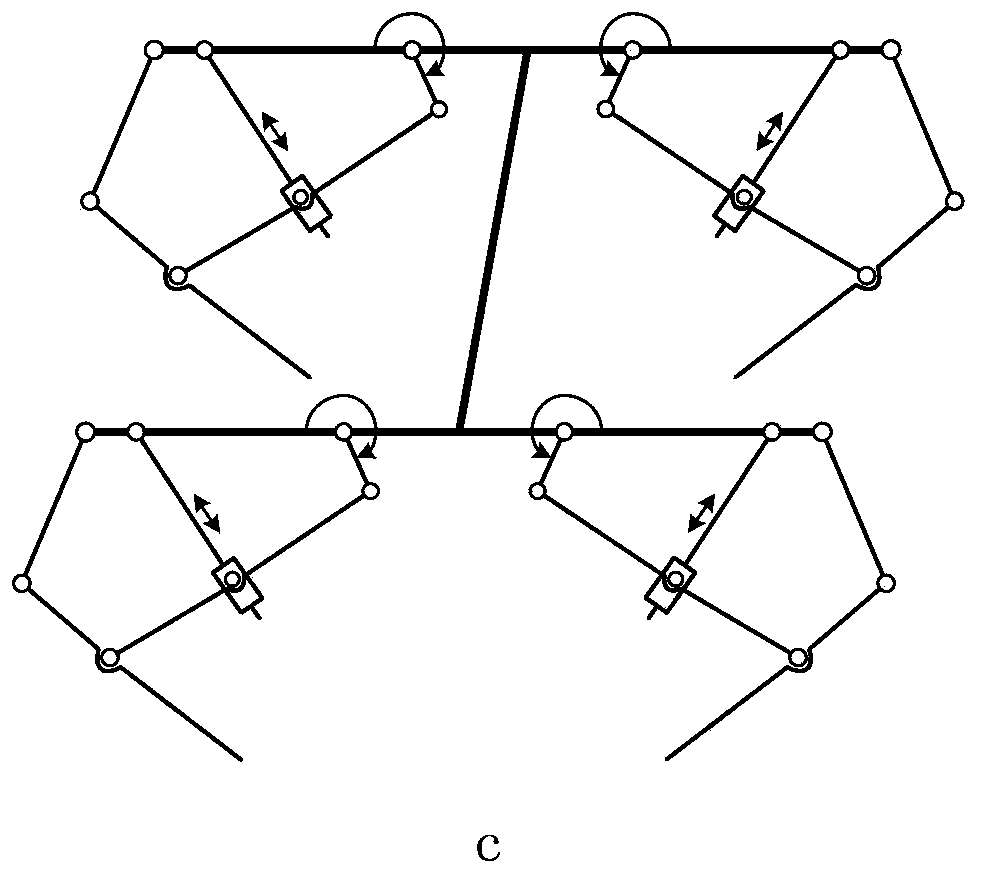
[0025] Such as figure 1 As shown, the hybrid drive leg mechanism is a multi-degree-of-freedom crank-rocker mechanism, one of which is driven by unidirectional constant speed rotation (unidirectional arrow arc curve), and the remaining degrees of freedom are driven by linear servo or rotary Servo drive (two-way arrow straight line or arc curve); one-way rotary drive drives the crank to rotate at high speed to realize the gait swing of the hybrid drive mechanism, realizing the rapidity and high efficiency of the mechanism; the servo drive controls the legs on the basis of the main drive. Adjust the foot to further adjust the trajectory of the foot end, so that the mechanism has good flexibility and adapts to different and complex terrains. Such as figure 2 and image 3 As shown, the black thick solid line represents the body of the mobile device. Through the different topological installations of the hybrid drive leg mechanism, different forms of the mobile device are formed....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More