

Strapdown north seeking method for two arbitrary positions
A two-position, north-finding instrument technology, applied in the direction of measuring devices, instruments, rotating gyroscopes, etc., can solve the problems of increasing the orientation time of the strapdown north-seeking system, cumbersome operation process, and many measurement positions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0078] like Figure 4 As shown, set the rotation angle μ=30° (that is, the north-seeking solution is performed at two positions with a difference of 30°), see figure 1 , 2 , 3, 4, the concrete steps of any two-position strapdown north-seeking solution method of the present invention are:
[0079] Step 1: Power on the North Finder and roughly level the system;
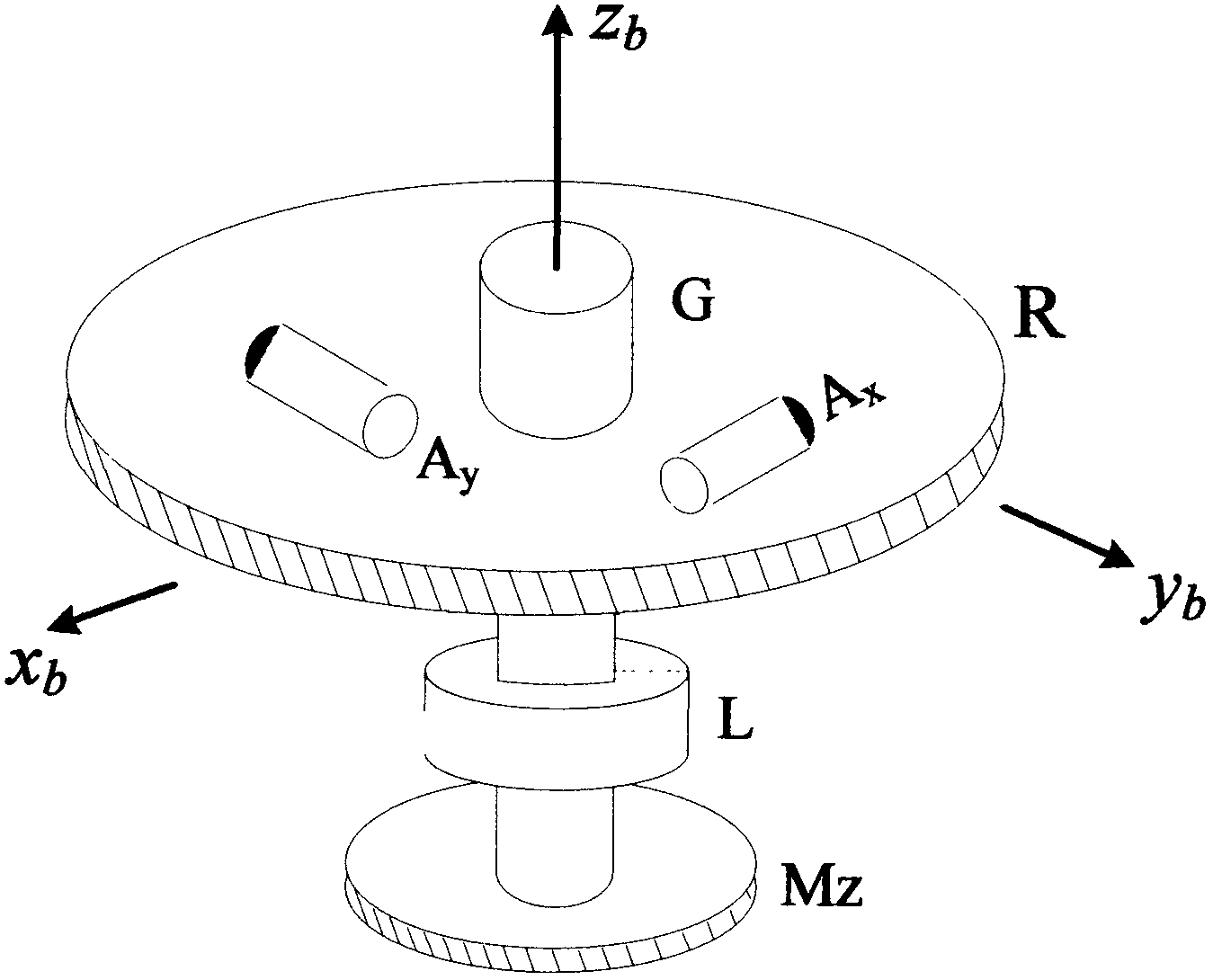
[0080] According to the instructions in step 1 above and figure 1 As shown, energize the north finder, according to the accelerometer A x and A y The output signal of the whole system is roughly leveled.
[0081] Step 2: Collect the output signals of the gyroscope and the accelerometer at position 1 (initial position);
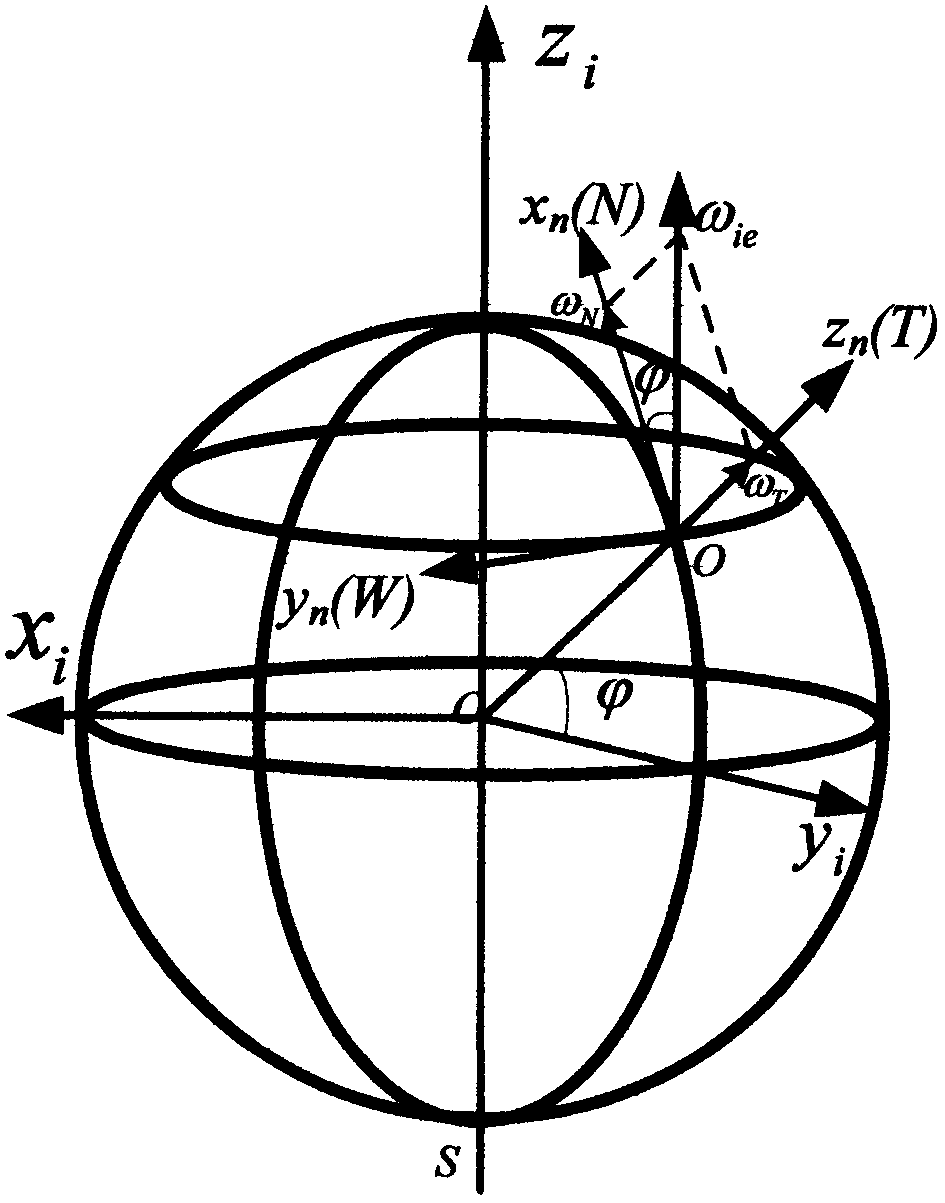
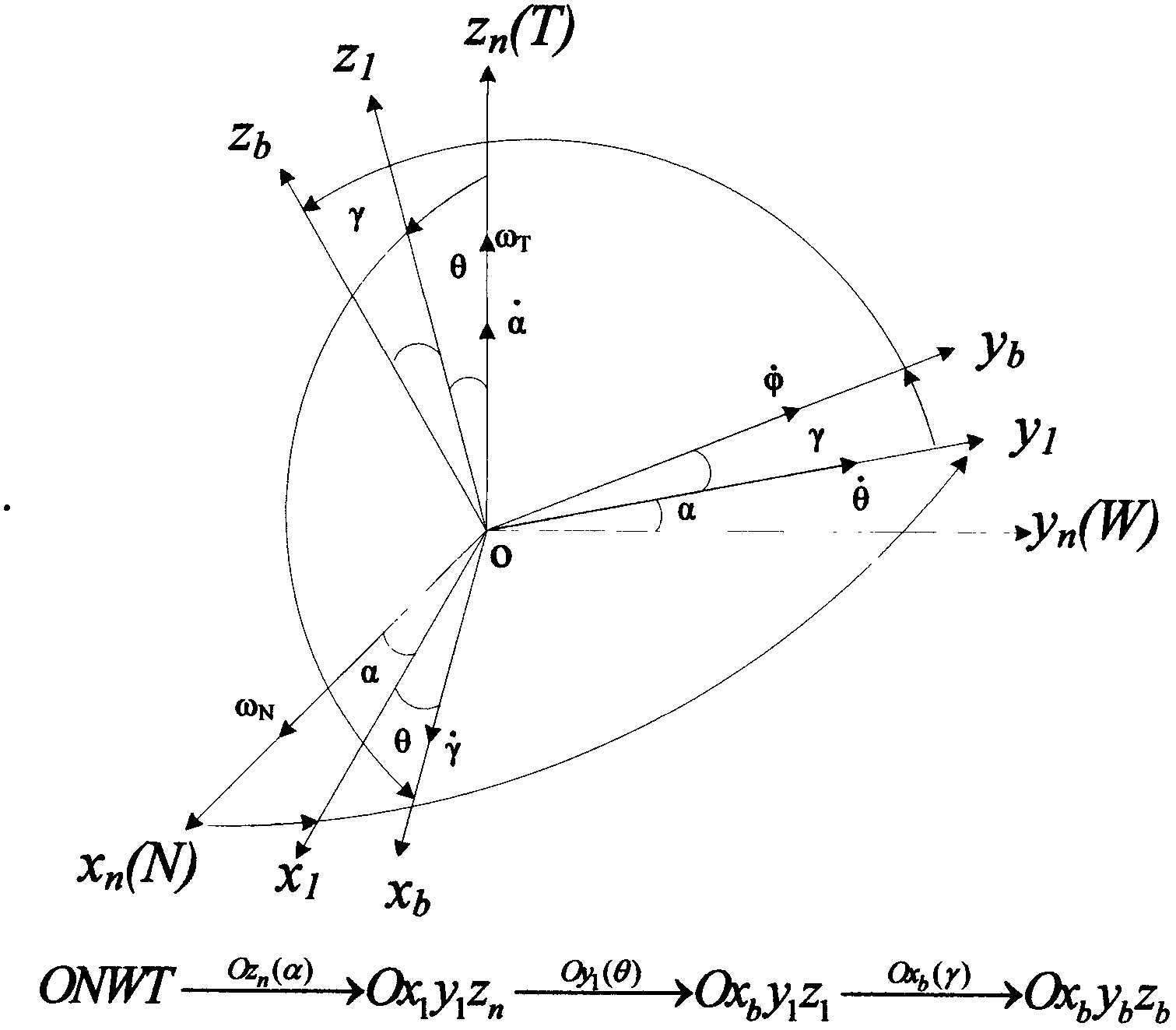
[0082] Through the previous analysis, combined with figure 2 and image 3 , the output signals of the gyroscope and accelerometer at position 1 (initial position) can be obtained from equations (3) to (6):
[0083] ω x ( ...
Embodiment 2
[0106] like Figure 4 As shown, set the rotation angle μ=60° (that is, the north-seeking solution is performed at two positions with a difference of 60°), see figure 1 , 2 , 3, 4, the concrete steps of any two-position strapdown north-seeking solution method of the present invention are:
[0107] Step 1: Power on the North Finder and roughly level the system;
[0108] According to the instructions in step 1 above and figure 1 As shown, energize the north finder, according to the accelerometer A x and A y The output signal of the whole system is roughly leveled.
[0109] Step 2: Collect the output signals of the gyroscope and the accelerometer at position 1 (initial position);
[0110] Through the previous analysis, combined with figure 2 and image 3 , the output signals of the gyroscope and accelerometer at position 1 (initial position) can be obtained from equations (3) to (6):
[0111] ω x ( ...
Embodiment 3
[0134] like figure 2 , 4 As shown, set the pitch angle θ=0, the roll angle γ=0, and the rotation angle μ=90° (that is, in the horizontal state, the north-seeking measurement is performed at two positions with a difference of 90°), see figure 1 , 2 , 3, 4, the concrete steps of any two-position strapdown north-seeking solution method of the present invention are:
[0135] Step 1: Power on the North Finder and roughly level the system;
[0136] According to the instructions in step 1 above and figure 1 As shown in the figure, the north finder is energized, and since the conditions of the pitch angle θ=0 and the roll angle γ=0 are assumed, there is no need to level it again.
[0137] Step 2: Collect the output signal of the gyro at position 1 (initial position);
[0138] Since the attitude angle is already included in the assumptions, there is no need to collect signals from the accelerometer, but only the output signal of the gyroscope. Through the previous analysis, combi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More