

Grab, continuous wall hydraulic grab grooving machine and grab operation method
The technology of grab bucket and bucket shell is applied in the field of hydraulic grab bucket forming machine for continuous wall, which can solve the problems of long time, limited scraping area, and difficulty in scraping the soil out.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0056] According to a preferred embodiment of the present invention, the grab operation method also includes a soil discharge step:
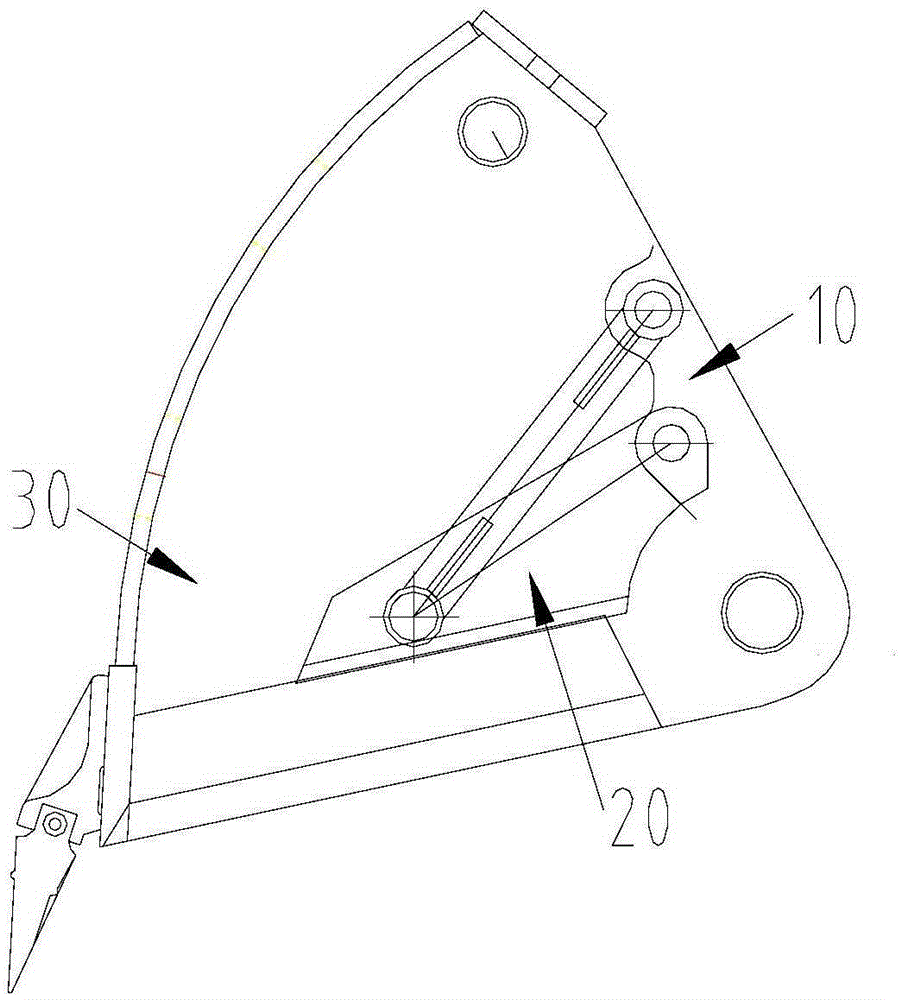
[0057] S20: The grab shell 30 starts to open to remove the grabbed rock and soil, and the residual rock and soil in the grab shell 30 pushes the mud scraper 20 to rotate to abut against the first stopper 14; specifically, when the grab When carrying out soil removal operations, such as Figure 7d As shown, the grab shell 30 along Figure 7d Rotate clockwise, in the process of gradually opening, the rock and soil in the grab shell 30 will be discharged from the grab shell 30 under the action of its own gravity. However, some rocks and soils in the grab shell 30 will adhere to the inner wall of the grab shell and fail to be discharged in time. These rocks and soils that have not been discharged in time also rotate clockwise, so that the mud scraper 20 is pushed by the adhesion force of the rocks and soils. down, along Figure 7d clockwise rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More