

DSRC-based anti-car-following interference method, positioning method, etc method and system
A technology of car following interference and vehicle positioning, which is applied in the field of intelligent transportation, can solve problems such as detection errors, inability to accurately determine the position and state of the rear car, and wrong deduction of fees, so as to reduce the probability of error handling, avoid the phenomenon of wrong deduction, Ensure the effect of normal operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
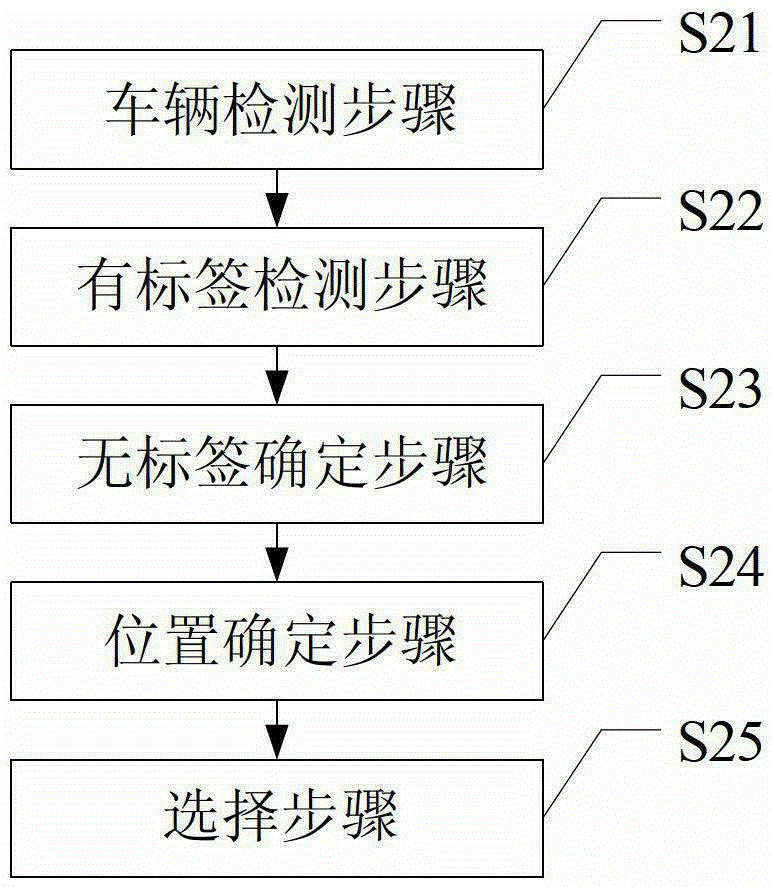
[0052] Such as figure 2 As shown, this embodiment provides a method for preventing car-following interference based on dedicated short-range communication, which includes the following steps S21-S25:
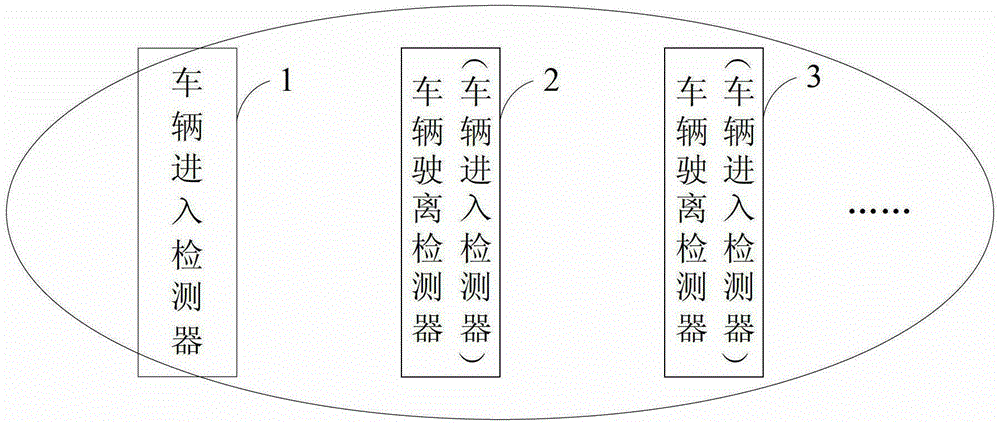
[0053] Vehicle number detection step S21, detecting the number of all vehicles in the communication area and the number of vehicles in each of the several preset areas included in the communication area through the vehicle entering detector and the vehicle leaving detector;
[0054] There is a tag detection step S22, the number and position of tagged vehicles in the communication area and each preset area are detected by the roadside unit;
[0055] No-label determination step S23, according to the detection results of the vehicle number detection step S21 and the label detection step S22, determine the quantity of no-label vehicles in the communication area and each preset area;
[0056] In this step, the number of untagged vehicles in the communication area is equal to the nu...
Embodiment 2
[0099] This embodiment provides a DSRC-based vehicle positioning method, which includes the following steps S21 to S24:
[0100] Vehicle number detection step S21, detecting the number of all vehicles in the communication area and the number of vehicles in each of the several preset areas included in the communication area through the vehicle entering detector and the vehicle leaving detector;
[0101] There is a tag detection step S22, the number and position of tagged vehicles in the communication area and each preset area are detected by the roadside unit;
[0102] No-label determination step S23, according to the detection results of the vehicle number detection step S21 and the label detection step S22, determine the quantity of no-label vehicles in the communication area and each preset area;
[0103] In this step, the number of untagged vehicles in the communication area is equal to the number of all vehicles in the communication area minus the number of tagged vehicles...
Embodiment 3
[0110] This embodiment provides a roadside unit for implementing the method for preventing car-following interference as in Embodiment 1 or for implementing the vehicle positioning method as in Embodiment 2 to determine the transaction sequence of transaction objects.
[0111] In one embodiment, the RSU includes:
[0112] The vehicle number detection module is used to detect the number of all vehicles in the communication area through the vehicle entry detector and the vehicle departure detector, and the number of vehicles in each preset area in several preset areas included in the communication area;
[0113] There is a tag detection module, which is used to detect the number and position of tagged vehicles in the communication area and each preset area through the roadside unit;
[0114] An unlabeled determination module, used to determine the number of unlabeled vehicles in the communication area and each preset area according to the detection results of the vehicle number ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More