Robot control method, robot control device, robot and robot system
一种控制方法、控制装置的技术,应用在通用控制系统、控制/调节系统、程序控制机械手等方向,能够解决打滑、把持位置改变、无法继续把持等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
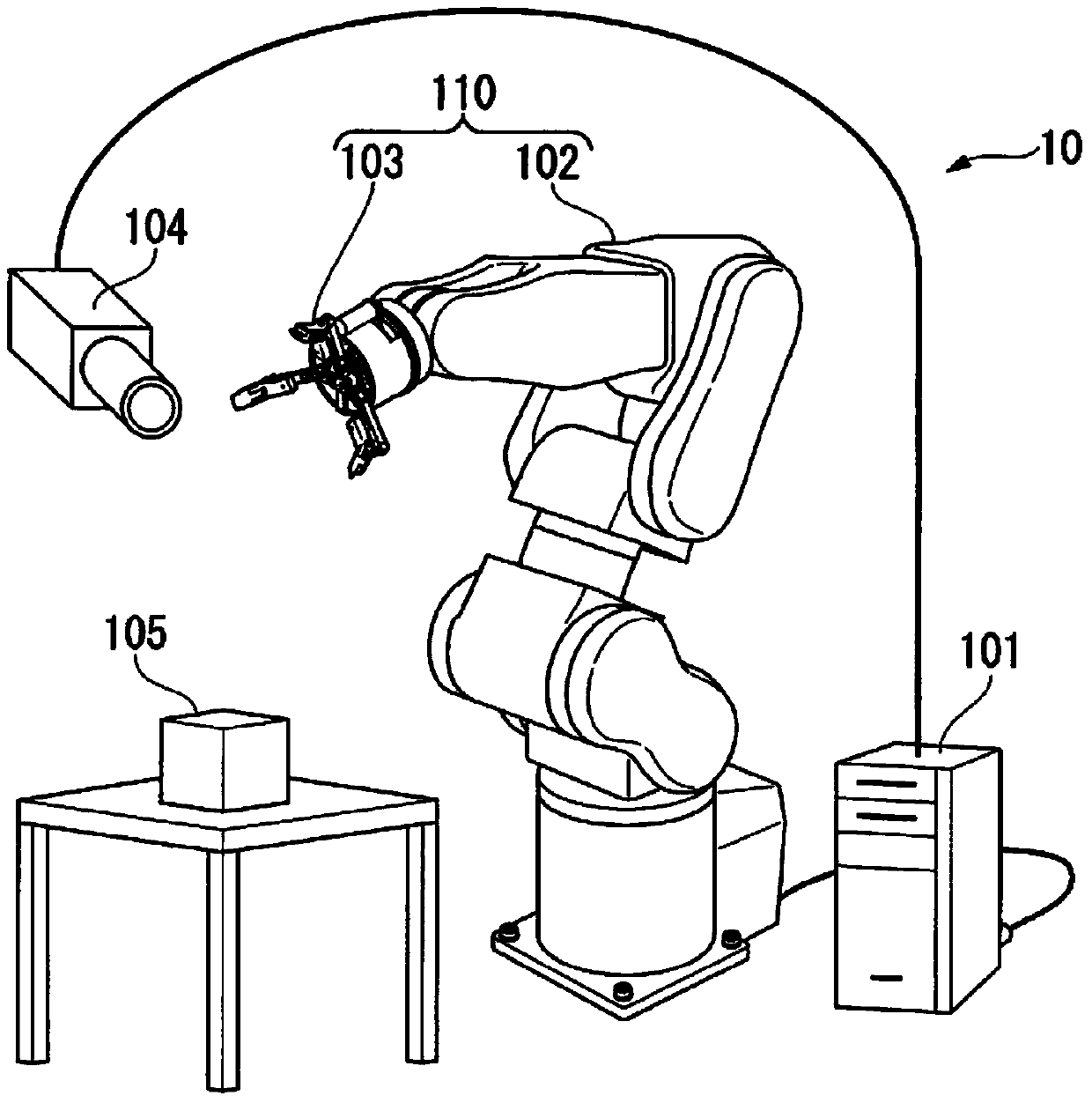
[0036] figure 1It is an external view showing the configuration of the robot system 10 according to this embodiment. The robot system 10 according to the present embodiment is configured to include a robot 110 , a control device 101 , and a camera 104 . The robot 110 is configured to include a manipulator 102 and a robot hand 103 . The object 105 is an example of an operation object of the robot system, and the robot 110 grasps the object 105 for operation.
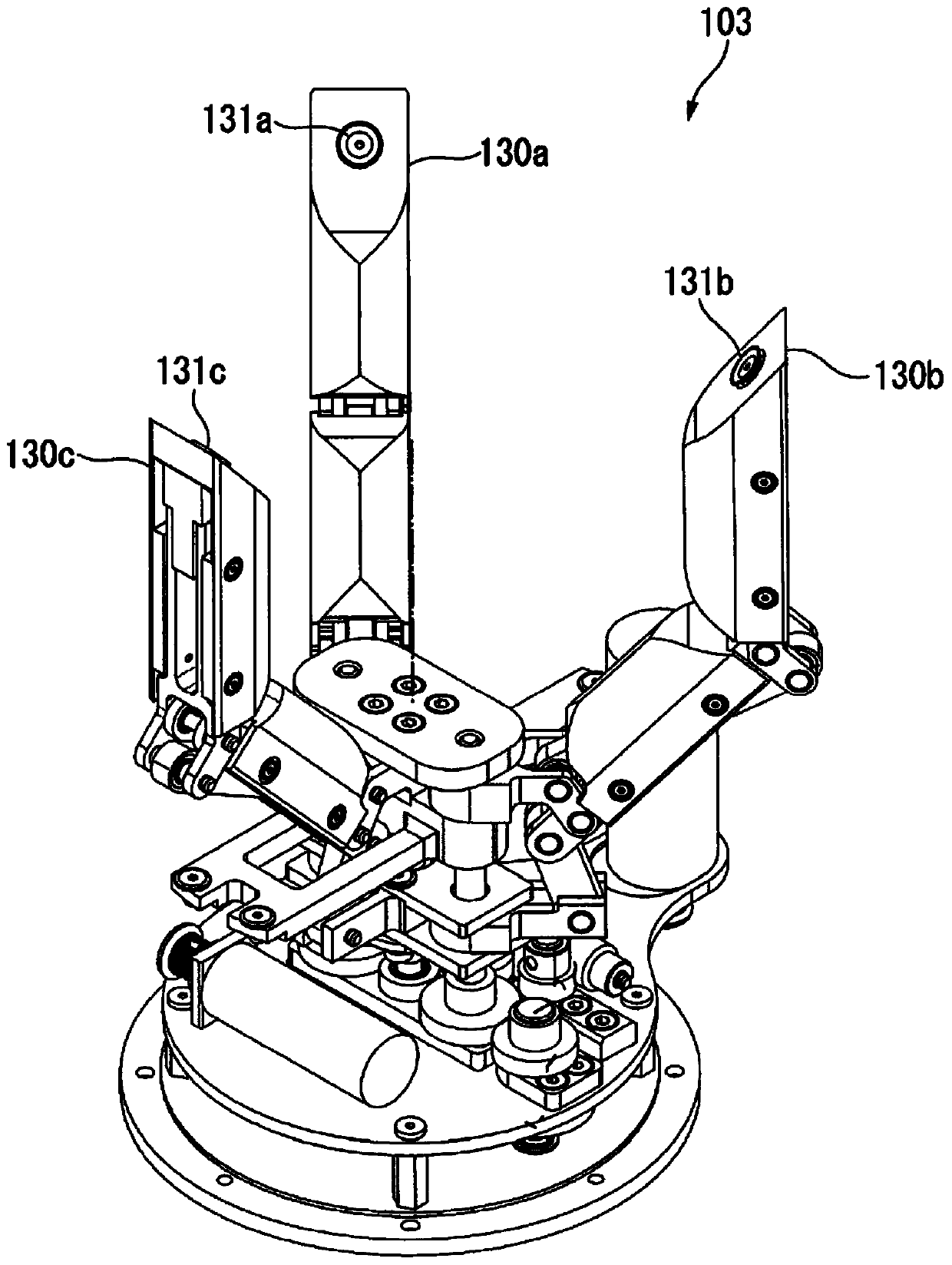
[0037] The robot hand 103 is attached to the tip of the robot hand 102 and has a plurality of fingers for grasping the object 105 . One end of the robot hand 102 is fixed to a base or the like, and the robot hand 103 is attached to the other end. The manipulator 102 moves the joints to move the robot hand 103 to a position and posture for grasping the object 105 . The camera 104 takes an image of the object 105 and inputs an image signal of the imaged result to the control device 101 . In addition, the camera 104 cap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com