

Unmanned aerial vehicle autonomous formation evaluation index and MPC formation control method
A technology for evaluating indicators and control methods, applied in the field of flight control, which can solve the problems of lack of free movement space, difficulty and complexity of UAV collision avoidance maneuvers, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0042] The present invention first establishes an evaluation index for autonomous formation of unmanned aerial vehicles.
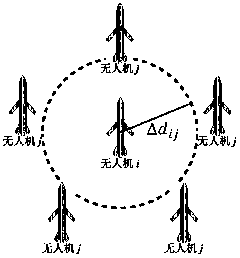
[0043] When the distance between drones flying in dense formation is too close, the probability of collision is high. Usually, drones will determine a safe distance d according to their own actual situation. s . d s It is the distance at which a drone must take appropriate action when it is closer to another drone or threat. When the distance between two UAVs is much greater than d s , the chance of collision between UAVs is small, and the formation can be considered loose at this time, that is, the requirements for the formation distance maintenance controller are not high; when the distance between UAVs is close to d s When , UAVs need to avoid possible collision threats at any time. At this time, the requirements for the fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More