

Multiple module vehicle parallel operation steering control method and parallel operation system
A steering control, multi-module technology, applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve the problems that cannot meet complex working conditions or individual cargo transportation, cannot complete complex mode steering functions, and vehicle placement is limited. It is convenient to achieve the target steering angle, realize the mode of combining the module vehicles, and the calculation is convenient.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be clearly and completely described below in conjunction with the accompanying drawings of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
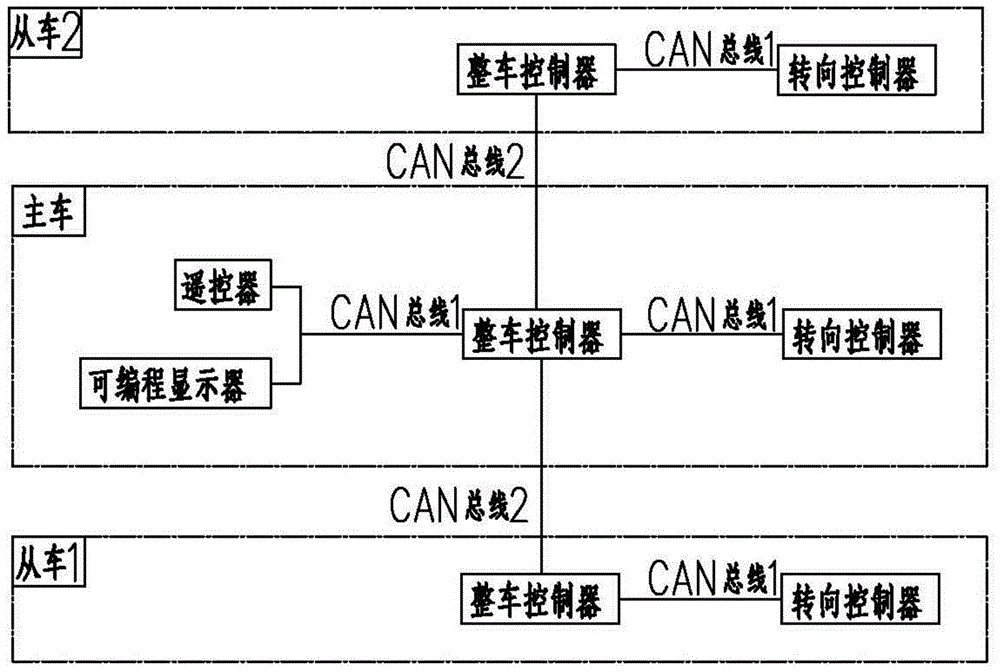
[0034] Such as figure 1 As shown, this embodiment takes a multi-module car parallel system composed of three modular cars as an example for description. Each modular car includes a vehicle controller, a steering controller, a remote controller, and a programmable display. The remote controller, programmable controller and steering controller are all connected to the vehicle controller through CAN bus 1 for communication, and the vehicle controllers of each module car communica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More