

Modular multi-joint flexible robot
A robot and multi-joint technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as limited application occasions, difficult dynamic control, and reduced contact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
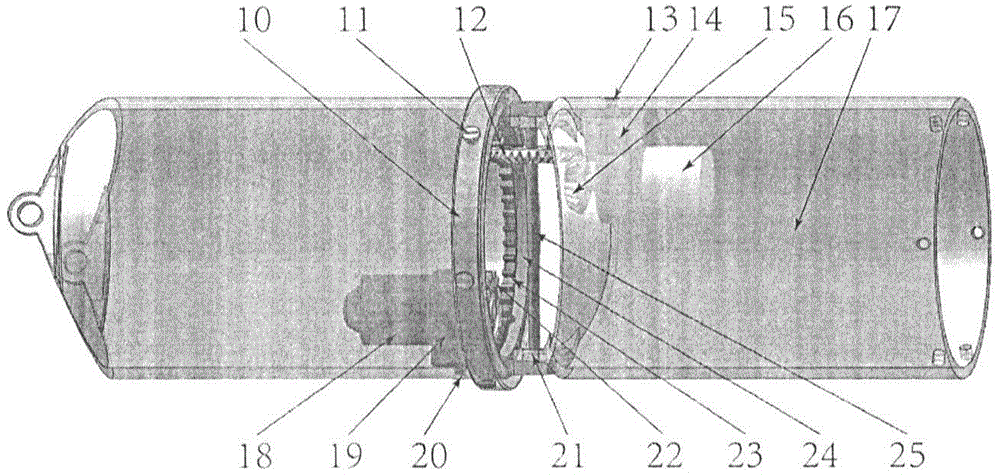
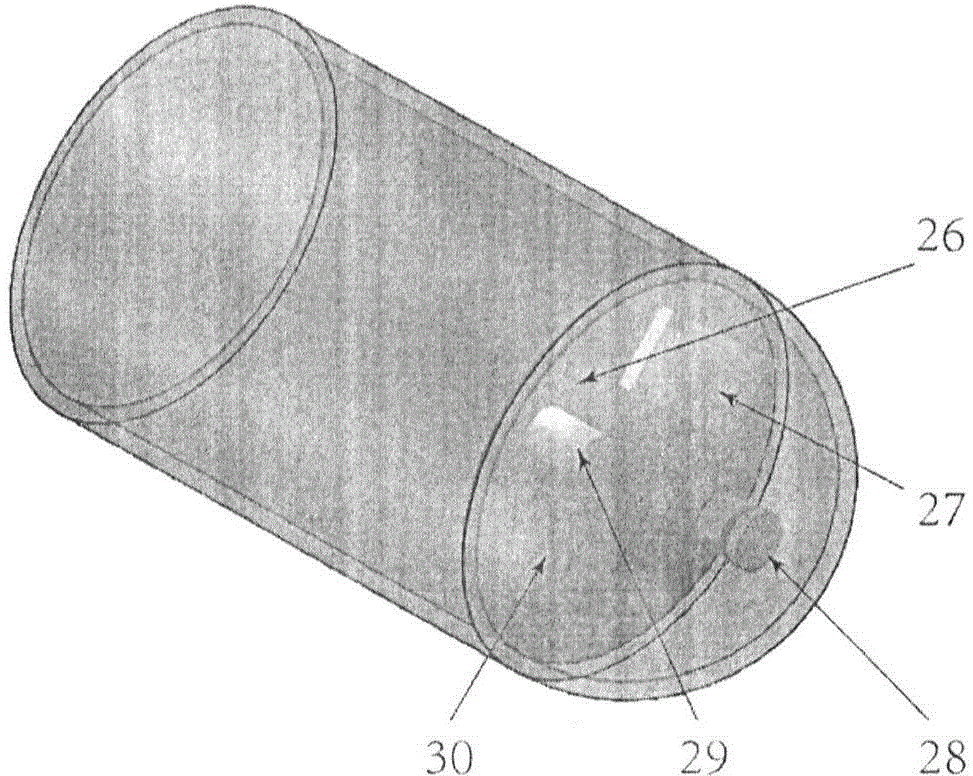
[0020] The present invention is a modular multi-joint flexible robot, such as figure 1 As shown, it includes head module 1, head cabin section 2, middle rotating module 3, middle turning module 4, middle turning module 5, middle turning module 6, middle turning module 7, middle turning module 8, tail cabin section 9, fixed Ring 10, fixed ring fixing screw 11, large swing bevel gear 12, swing motor support seat fixing bolt 13, swing motor support seat 14, small swing bevel bevel gear 15, swing motor 16, intermediate rotation module shell 17, roll motor 18 , rolling motor fixing seat 19, rolling motor fixing seat fixing bolt 20, bearing 21, rolling gear 22, rolling ring gear 23, rolling ring gear fixing ring 24, bogie connecting shaft 25, mounting plate 26, battery 27. Head camera 28, light source 29, motion control circuit 30 (including attitude senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More