

A finger-supported quadruped robot with functions of climbing, grabbing and digging
A quadruped robot and robot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of high manufacturing cost of silk-footed robots, uncoordinated walking of quadruped robots, unusable quadruped robots, etc., and achieve excellent terrain passing performance, The effect of improving the running quality and improving the running reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
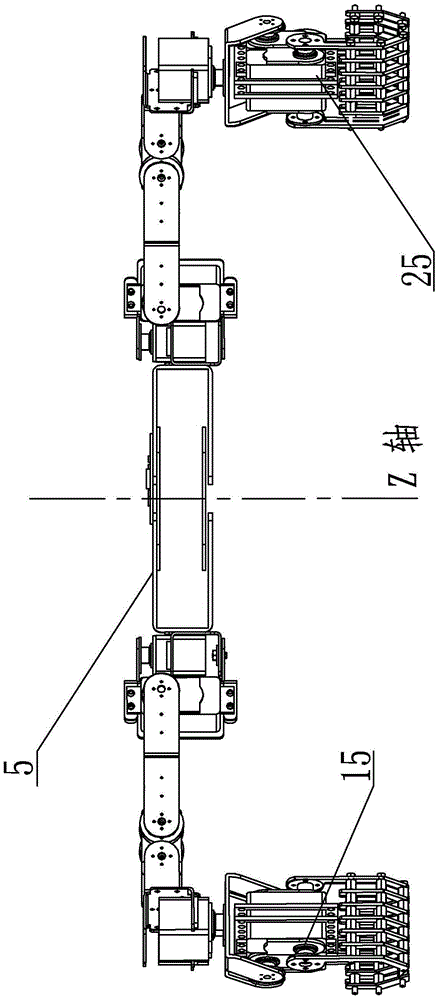
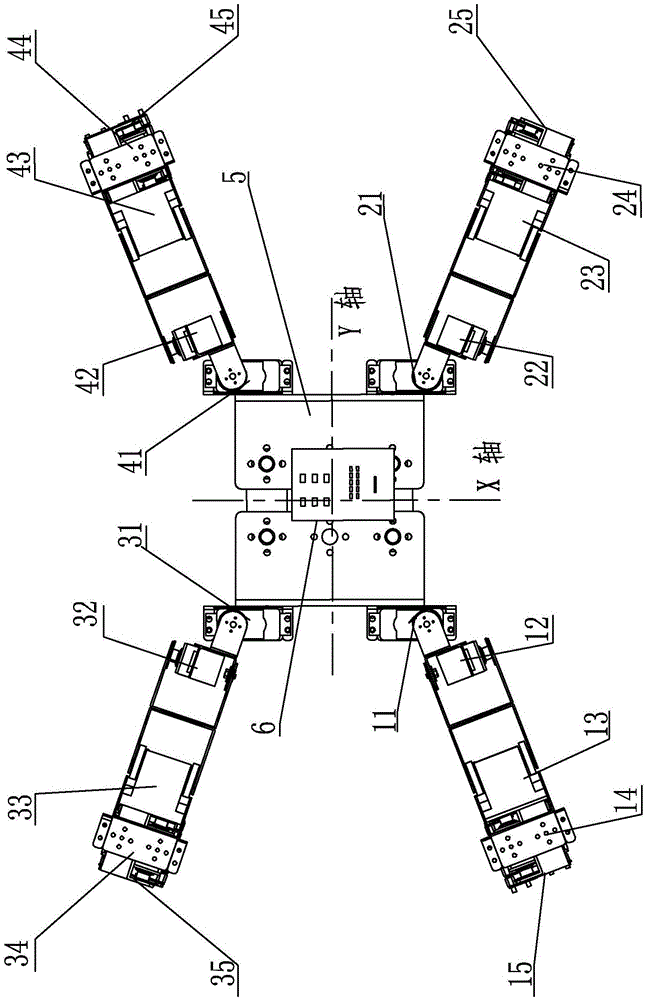
[0008] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment, a finger-supported quadruped robot with climbing, grabbing and digging functions described in this embodiment, the robot includes a left front leg, a right front leg, a left rear leg, a right rear leg, a torso body 5 and The controller 6, the trunk body 5 is a rectangular frame, the left front leg, the right front leg, the left rear leg and the right rear leg have the same structure, the trunk body 5 is arranged horizontally, and the left front leg, the right front leg, the left rear leg and the right rear leg are respectively symmetrical Set on both sides of the trunk body 5, the controller 6 is fixedly installed on the trunk body 5, and the controller 6 is connected with the left front leg, the right front leg, the left rear leg and the right rear leg respectively, and the left front leg is connected with the right front leg and the left rear leg. The leg and the right hind leg...
specific Embodiment approach 2
[0011] Specific implementation mode two: combination figure 1 and 2 Describe this embodiment, a finger-supported quadruped robot with climbing, grabbing and digging functions described in this embodiment, the trunk body 5 includes two U-shaped frames and a plurality of connecting plates, two U-shaped frames The openings of the two U-shaped frames are oppositely arranged, and the two oppositely arranged U-shaped frames are fixedly connected by a plurality of connecting plates, and the controller 6 is arranged on the two U-shaped frames, and the others are the same as the first embodiment.
specific Embodiment approach 3
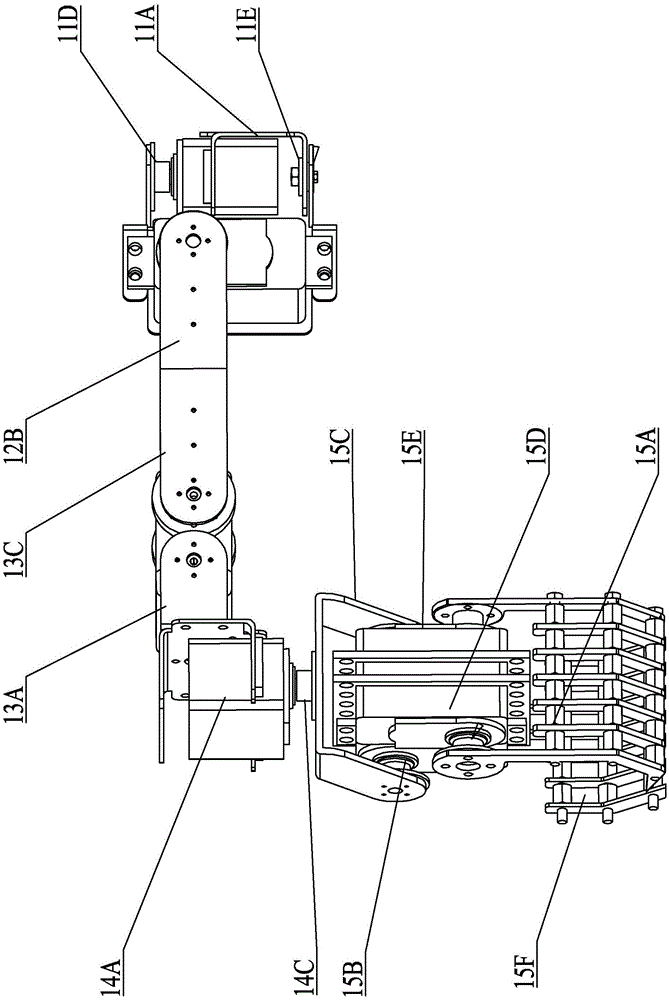
[0012] Specific implementation mode three: combination figure 1 , Figure 2-Figure 12 Describe this embodiment, a finger-supported quadruped robot with climbing, grabbing and digging functions described in this embodiment, the left foreleg includes a left foreleg hip joint 11, a left foreleg thigh joint 12, and a left foreleg knee joint 13. The calf joint 14 of the left front leg and the knuckle joint 15 of the left front leg, the hip joint 11 of the left front leg includes the first steering gear support bracket 11A of the left front leg, the U-shaped bracket 11B of the first steering gear of the left front leg, and the first steering gear 11C of the left front leg , the first metal steering wheel 11D of the left front leg and the first cup bearing 11E of the left front leg, the thigh joint 12 of the left front leg includes the second steering gear support bracket 12A of the left front leg, the long U-shaped bracket 12B of the first steering gear of the left front leg, the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More