

A robot hand-eye calibration method based on two degrees of freedom 3D vision sensor
A visual sensor and calibration method technology, which is applied to instruments, measuring devices, optical devices, etc., can solve problems such as limitations of navigation capabilities, and achieve the effects of high measurement accuracy, high calculation accuracy and simple method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
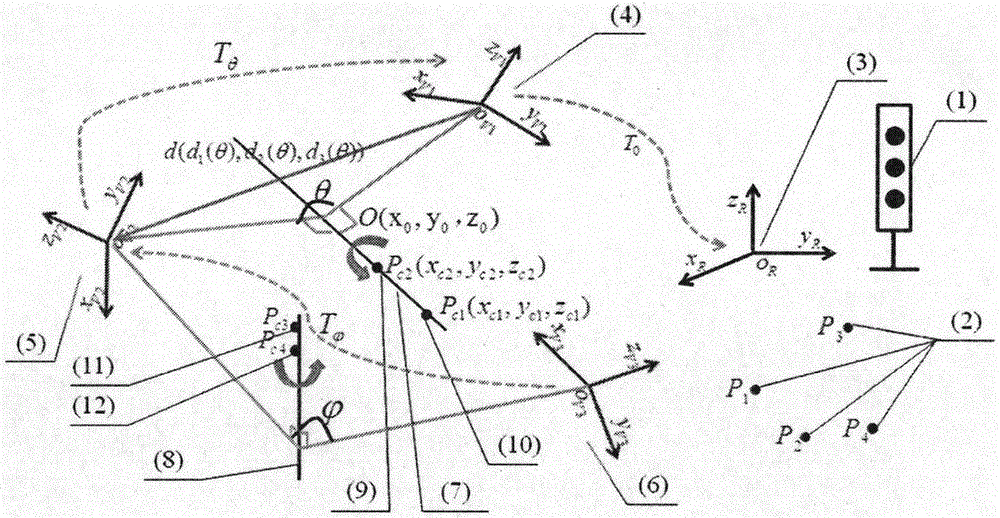
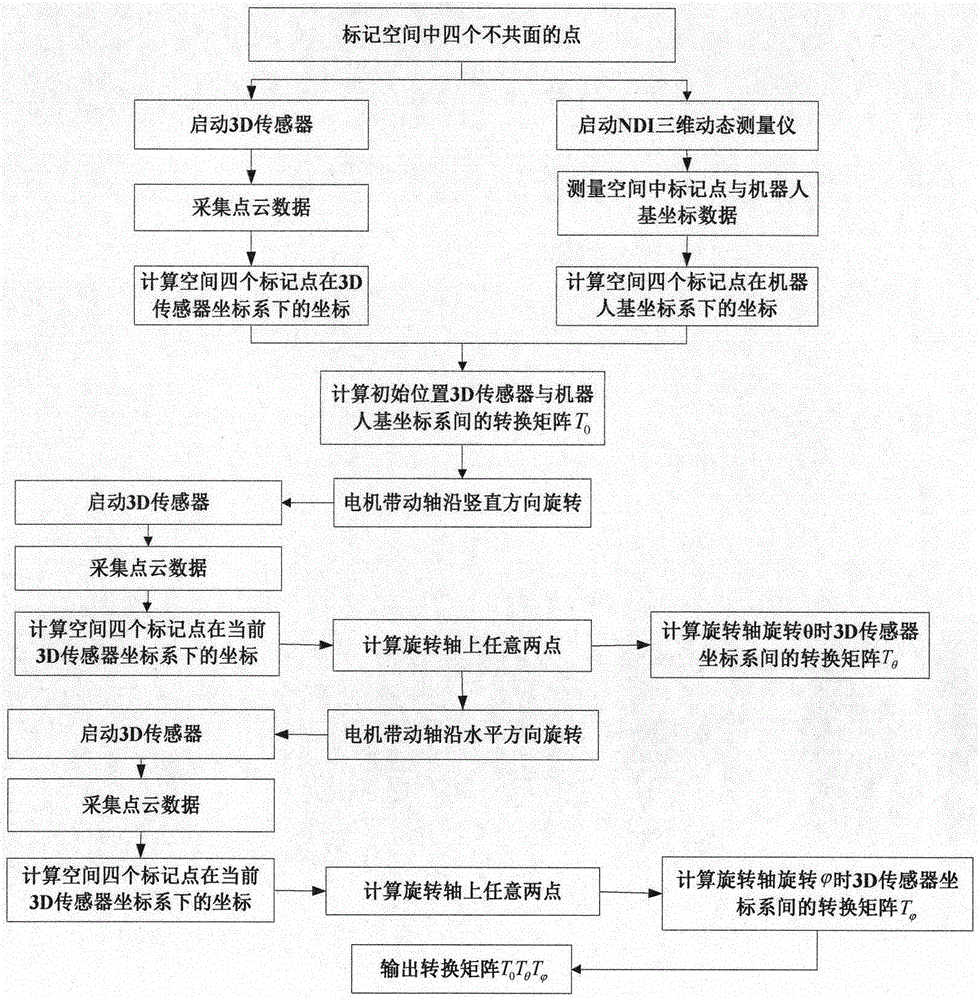
[0016] like Figure 1 to Figure 4 As shown in the present invention, a robot hand-eye calibration method based on a two-degree-of-freedom 3D vision sensor, the rotation angles of the robot head in the vertical direction and the horizontal direction relative to the initial position are respectively θ, , the calibration process is mainly divided into the following steps:
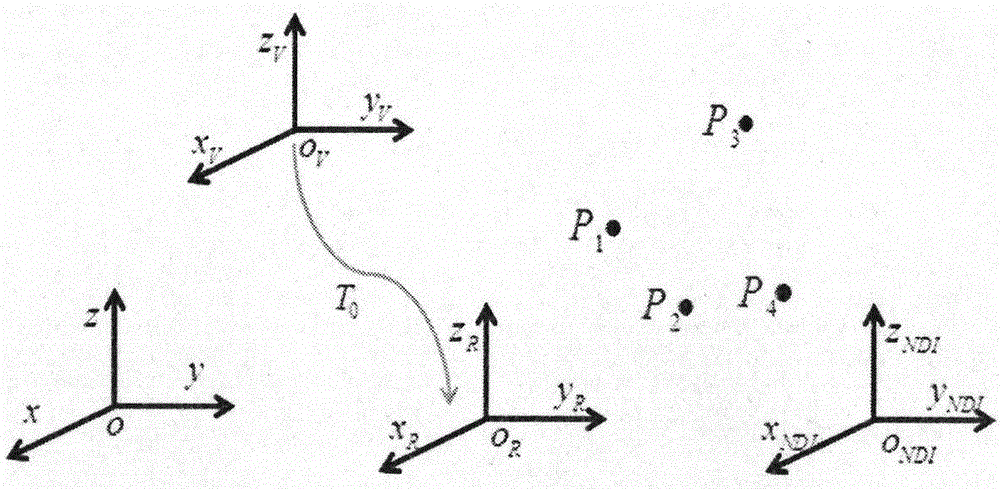
[0017] The first step is the coordinate transformation matrix T between the initial position visual coordinate system and the robot base coordinate system 0 calculation;
[0018] Pick four points P that are not coplanar in space 1 , P 2 , P 3 , P 4 , obtain the three-dimensional coordinates of four points in the visual coordinate system through the visual sensor, which are respectively recorded as:
[0019] P V1 (x v1 ,y v1 ,z v1 ), P V2 (x v2 ,y v2 ,z v2 ), P V3 (x v3 ,y v3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More