

A control method and device for a medical robot arm
A control method and technology of a control device, which are applied in the field of medical devices, can solve the problem that the accuracy needs to be improved, and achieve the effect of reducing the number of adjustments and improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
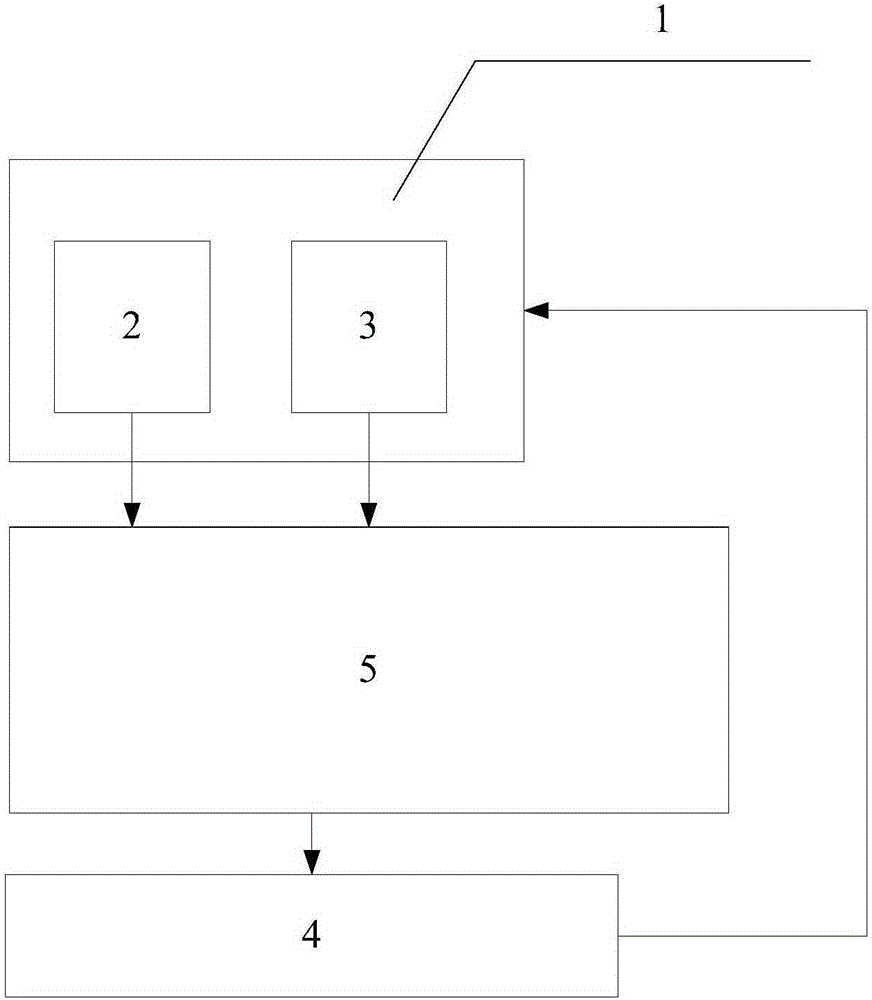
[0041] A control device for a medical mechanical arm, the device is used to control the movement of the medical mechanical arm 1, such as figure 1 As shown, the device includes an angle sensor 2, a position sensor 3, a drive motor 4 and a control module 5, the input end of the control module 5 is connected with the angle sensor 2 and the position sensor 3, and the output end is connected with the input end of the drive motor 4 to drive The output end of the motor 4 is connected to the medical robot arm 1 , wherein the angle sensor 2 is arranged on the medical robot arm 1 , and the position sensor 3 is arranged at the end of the medical robot arm 1 .
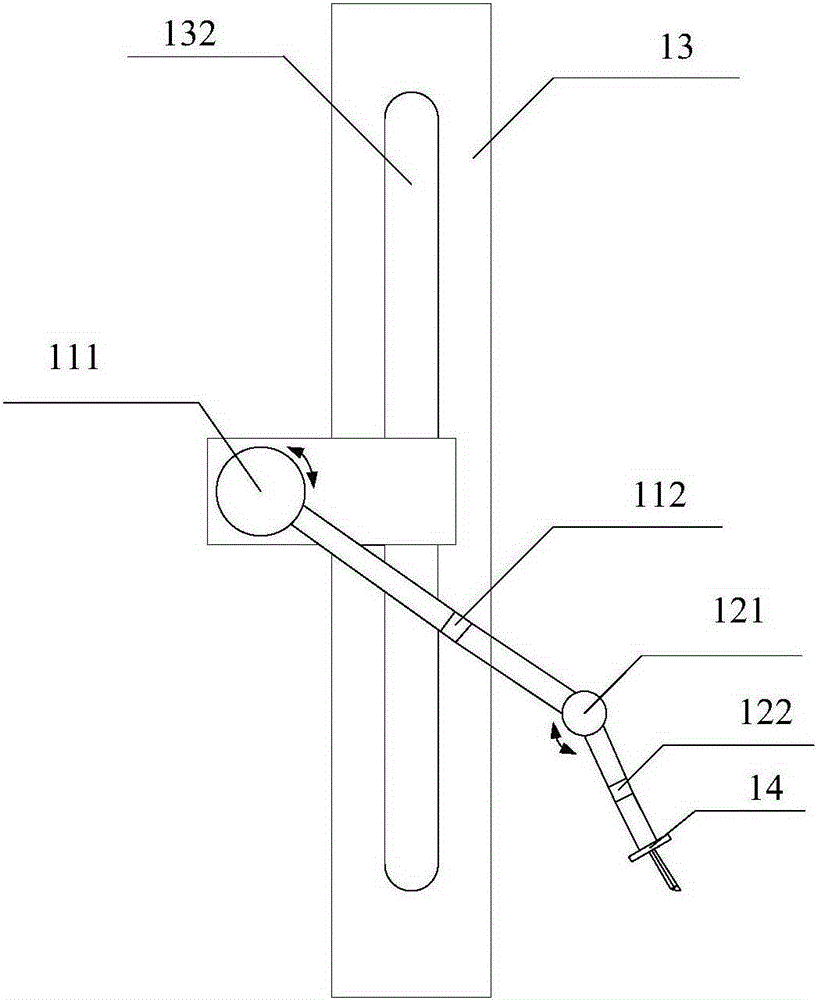
[0042] Such as figure 2 As shown, the medical mechanical arm 1 includes a positioning joint, an adjusting joint and a vertical motion assembly 13, and the driving motor 4 includes a positioning joint motor, an adjusting joint motor and a vertical motion motor, and the positioning joint motor, the adjusting joint motor and the ve...
Embodiment 2
[0065] The same parts as those in Embodiment 1 are not described again. The difference is that in Embodiment 2, the first positioning joint 111 and the first adjustment joint 121 are the same joint, and the second positioning joint 121 and the second adjustment joint 122 are the same joint. a joint.
Embodiment 3
[0067] The same parts as those in Example 1 are not described again.
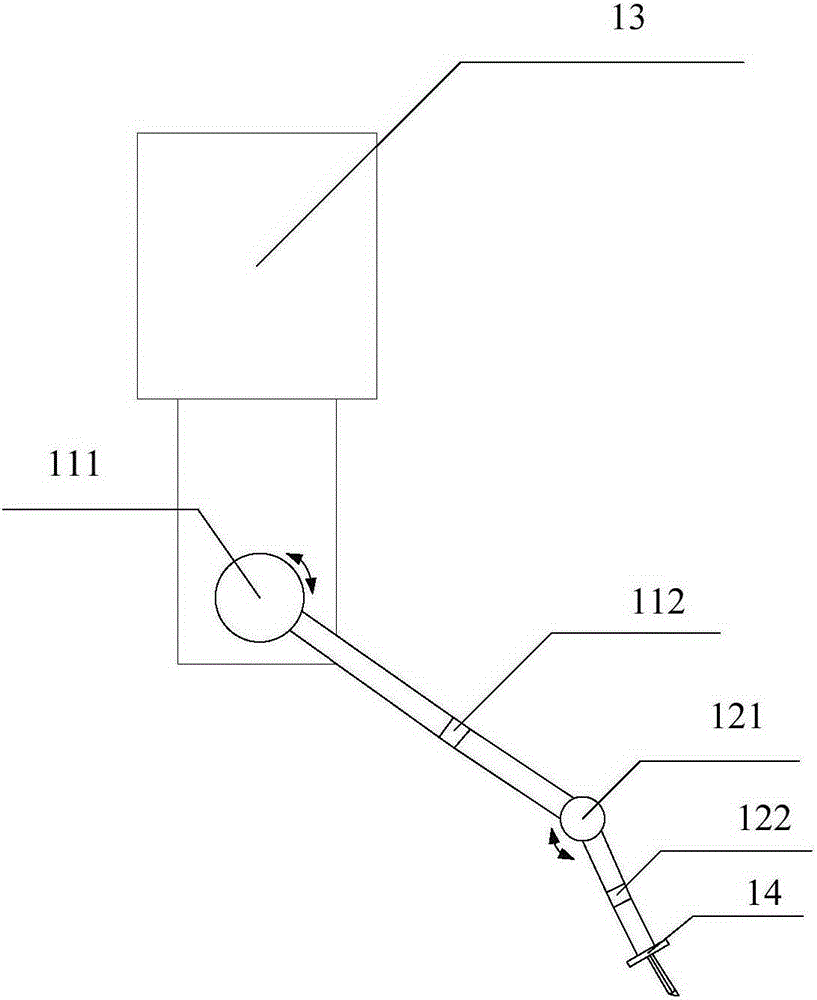
[0068] Such as image 3 As shown, the vertical movement assembly 13 in this embodiment is a telescopic mechanism, and the vertical movement is no longer realized by the guide rail 131 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More