

Body-variable and modular four-foot walking robot with energy storage function
A walking robot, modular technology, applied in the field of robotics, can solve problems such as ignoring the role of the body, achieve the effects of reducing development and use costs, simplifying structure and control, and expanding space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
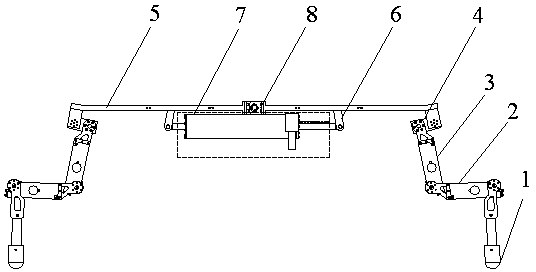
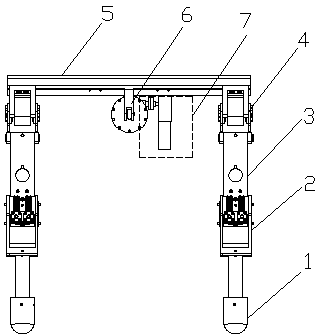
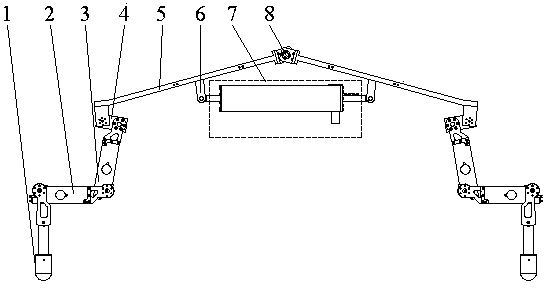
[0023] Such as Figures 1 to 6 As shown, the variable body modular quadruped walking robot with energy storage function of the present invention includes a fuselage structural unit, and the fuselage structural unit includes a frame 5, and the number of the frame 5 has two groups, and the two groups of frames 5 pass through The hinge unit 8 is connected so that the frame 5 can freely rotate around the hinge unit 8 . A frame connecting plate 4 is arranged at the end of each group of frame 5, and the frame connecting plate 4 is connected with the foot structure unit. The quadruped walking robot relies on the foot structure unit to walk. The foot structure unit includes a hip joint 3, a thigh joint 2 and a calf joint 1. One end is hinged, and the other end of the thigh joint 2 is hinged with the calf joint 1. Wherein, relative rotation can be performed between the frame 5 and the hip joint 3 , between the hip joint 3 and the thigh joint 2 , and between the thigh joint 2 and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More