

An assisted walking robot suitable for medical rehabilitation, correction or training
A walking robot and power-assisting technology, which is applied in the direction of appliances, manipulators, physical therapy, etc. to help people walk, can solve the problems of poor use effect and different operating conditions, and achieve the effect of simple structure, compact and reasonable layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be described in detail below in conjunction with the accompanying drawings.
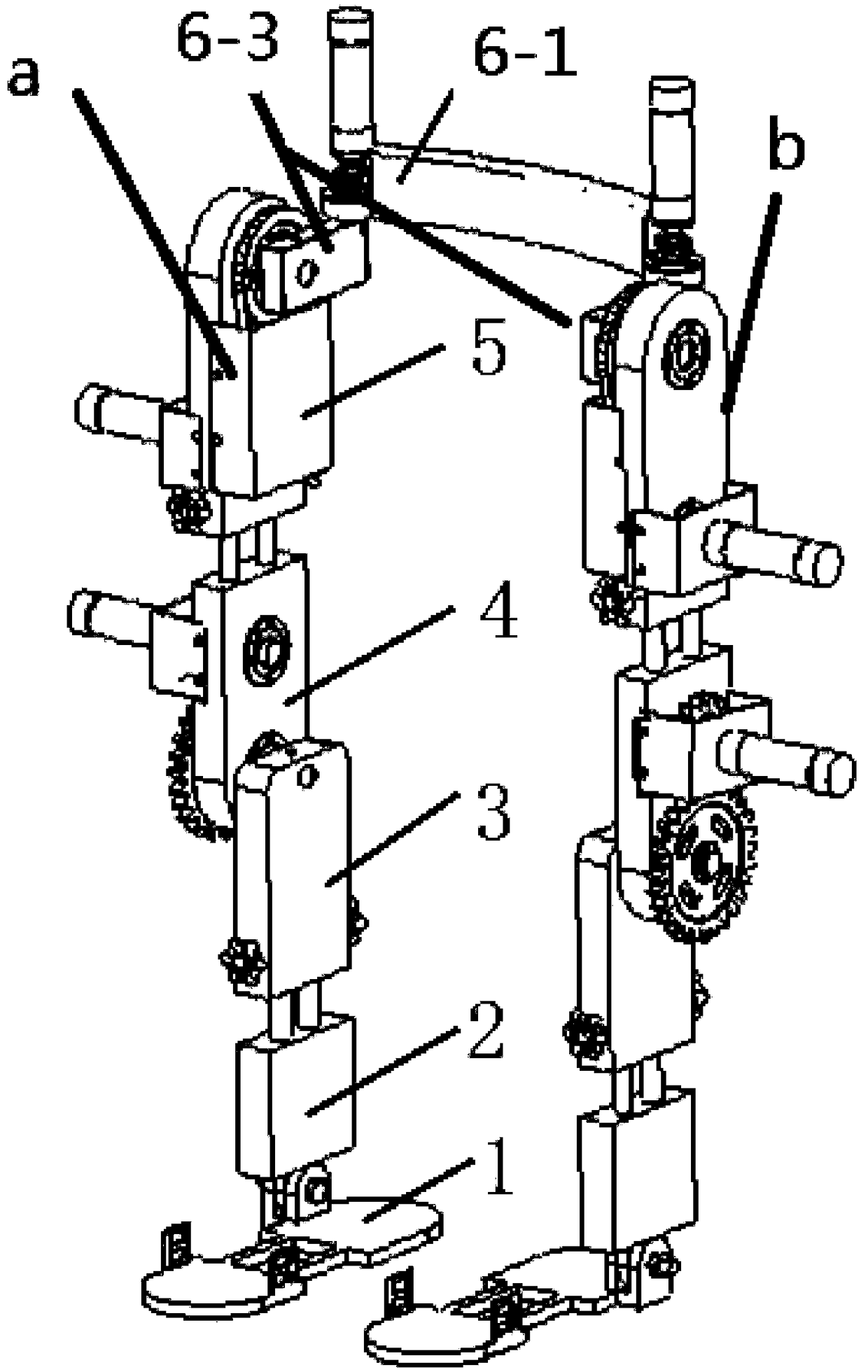
[0079] Such as figure 1 As shown, the power-assisted walking robot suitable for medical rehabilitation, correction or training of the present invention is characterized in that it includes a left lower limb a, a right lower limb b, a lumbar support plate 6-6, a left connecting block and a right connecting block; wherein, The lumbar support plate is a curved strip plate, arranged horizontally, with the concave surface facing forward, and the left and right ends of the lumbar support plate are respectively connected to the left lower limb and the right lower limb through the left connecting block and the right connecting block;
[0080] Both the left connecting block and the right connecting block have an integrated shaft and hole structure, and the vertical upward direction is the shaft and the horizontal direction is opened;
[0081] Taking the vertical bisector of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More