

Single domain design change processing method supporting collaborative design of five-link robot
A five-link robot, design change technology, applied in electrical digital data processing, special data processing applications, instruments, etc., can solve problems such as inability to obtain better design solutions and inability to resolve design conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
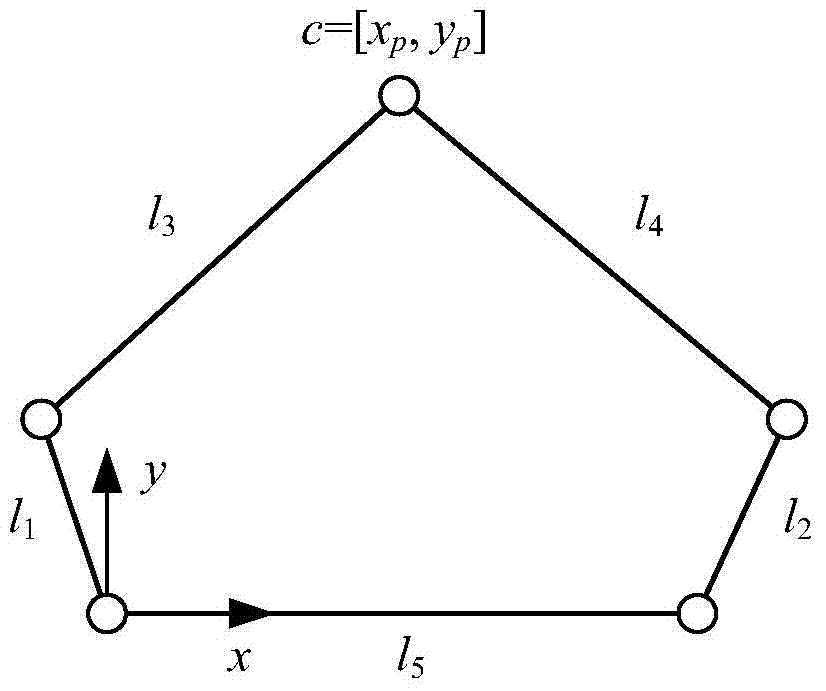
[0065] The five-link robot is a typical electromechanical product with a structure such as figure 1 As shown, it includes five connecting rods, which are connecting rod l 1 , connecting rod l 2 , connecting rod l 3 , connecting rod l 4 and connecting rod l 5 , where the connecting rod l 1 and connecting rod l 2 Driven by the actuator (namely, the motor), the system control goal is to make point c move according to a predetermined trajectory, where the x-axis and y-axis are the reference coordinate systems of the motion trajectory.
[0066] The motion track of point c of the five-linkage robot in this embodiment is as follows,
[0067] x p =-0.1+0.1cos(1.2566t);
[0068] the y p =0.3+0.1sin(1.2566t);
[0069] Among them, t is time.
[0070] right figure 1 The shown five-link robot includes 37 design variables, including 33 variables in the mechanical domain and 4 variables in the control domain. The design variables include the mechanical structure parameter vector ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More