A sdre parameter adjustment method suitable for attitude maneuvering and tracking control of wheel-controlled satellites
A satellite attitude and tracking control technology, applied in the control/regulation system, non-electric variable control, position/direction control and other directions, can solve the problem of inability to guarantee, cannot guarantee satellite focus control, etc., to achieve high-precision effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
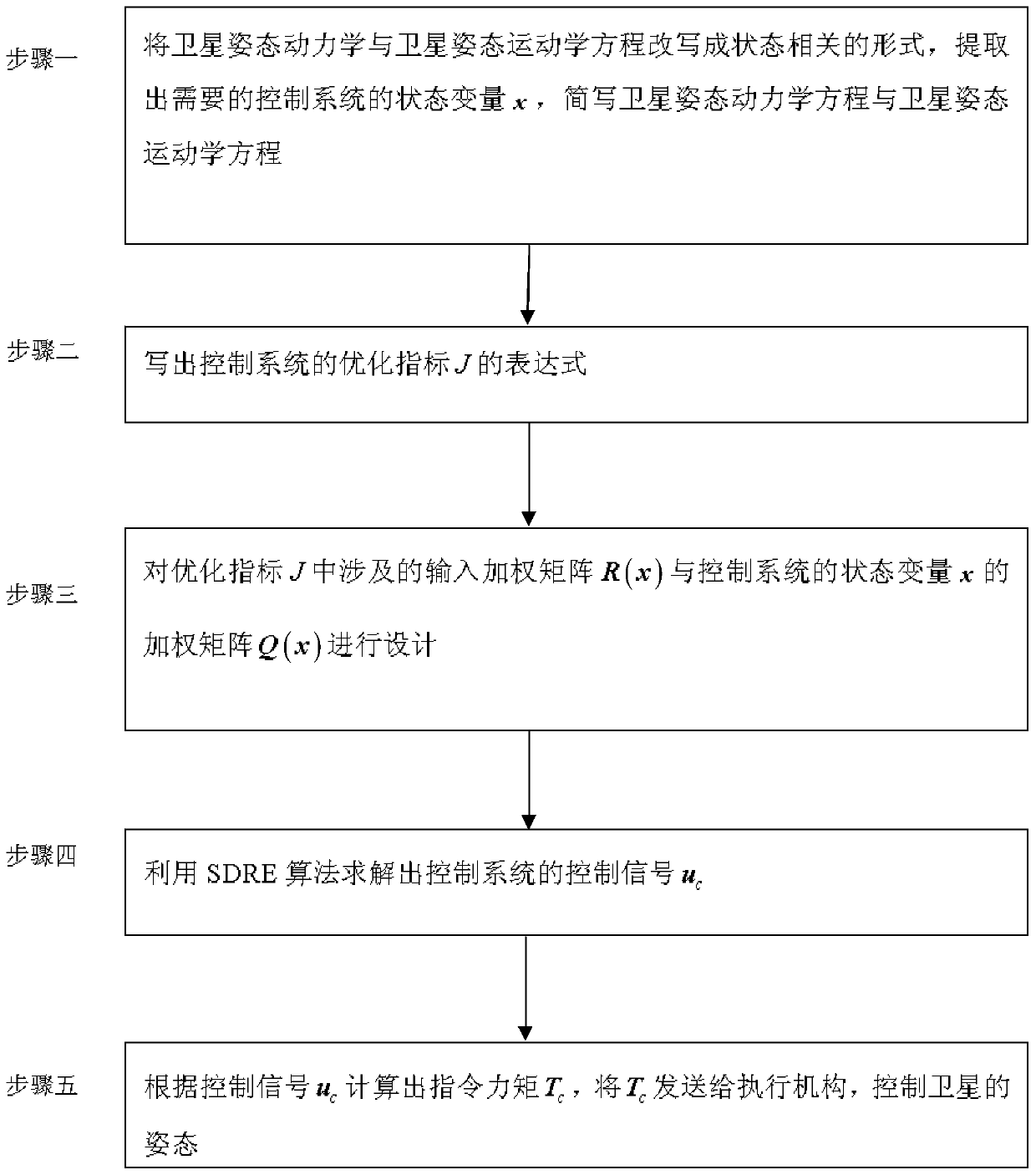
[0022] Specific embodiment one: a kind of SDRE parameter adjustment method that is applicable to wheel control satellite attitude maneuvering and tracking control, specifically is prepared according to the following steps:
[0023] Step 1, rewriting the satellite attitude dynamic equation and the satellite attitude kinematic equation into a state-related form, extracting the required state variable x of the control system, and abbreviating the satellite attitude dynamic equation and the satellite attitude kinematic equation;
[0024] The dynamic equation of satellite attitude refers to the relationship between the torque received by the satellite and the angular velocity of the satellite attitude; the kinematic equation of satellite attitude refers to the relationship between the angular velocity of the satellite attitude and the rate of change of the satellite attitude parameters;
[0025] Step 2. Write the expression of the optimization index J of the control system according...
specific Embodiment approach 2
[0029] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is: in the step 1, the satellite attitude dynamic equation and the satellite attitude kinematic equation are rewritten into a state-related form, and the state variable x of the required control system is extracted. , to abbreviate the satellite attitude dynamic equation and the satellite attitude kinematic equation; the specific expression is:
[0030]
[0031] Equation (2) rewrites the satellite attitude dynamic equation and the satellite attitude kinematic equation into a state-dependent form, where ω e It is a 3×1 array, which is the error attitude angular velocity of the satellite, which means that the attitude angular velocity ω of the satellite and the target attitude angular velocity ω r the difference; is ω e Derivative of ; ω e × is ω e The cross product matrix; ω r is a 3×1 array, which is the angular velocity of the target attitude, which means the angular veloc...
specific Embodiment approach 3
[0047] Specific embodiment three: this embodiment is different from one of the specific embodiments one to two in that: the expression of the optimization index J of the control system is written in the step 2, and the specific expression is as follows:
[0048]
[0049] x in formula (6) T is the transposition of the state variable x, Q(x) is the weighted matrix of the state variable, x is the state variable of the control system, u c T is the control signal u of the control system c The transpose of , R(x) is the weighting matrix for the input.
[0050] Other steps and parameters are the same as one of the specific implementation modes 1 to 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



