

Pneumatic-muscle-driven exoskeleton assisting mechanism
A technology of pneumatic muscles and power-assisted mechanisms, which is applied in the field of human body power-assisted devices and exoskeleton power-assisted mechanisms, can solve the problems of low power/mass, low system work efficiency, high system cost, etc. good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Further illustrate the present invention below in conjunction with accompanying drawing.
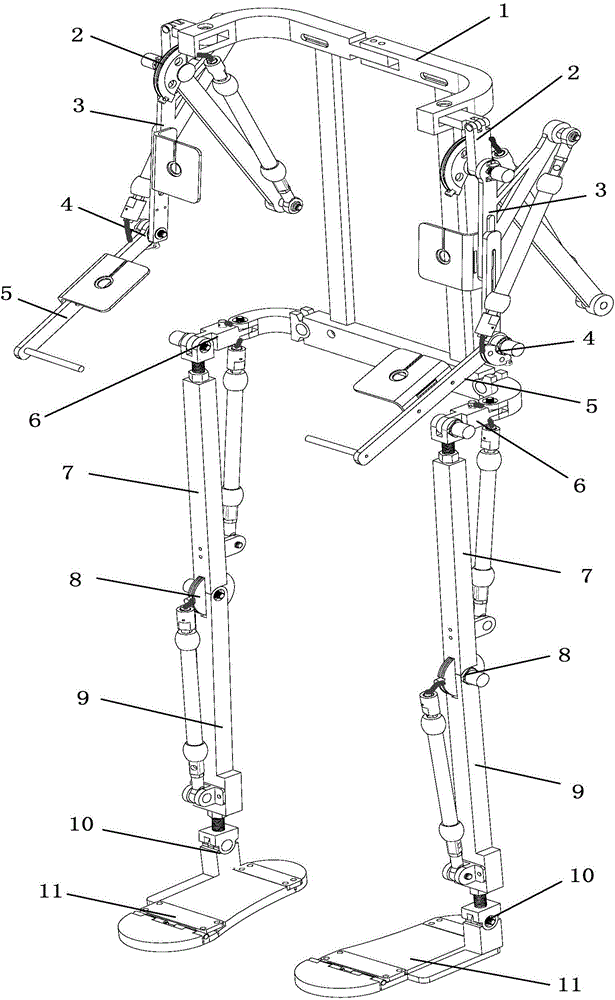
[0039] Such as figure 1 As shown, the present invention includes a back support 1, a shoulder joint part 2, an upper arm part 3, an elbow joint part 4, a small arm part 5, a hip joint part 6, a thigh part 7, a knee joint part 8, a calf part 9, an ankle joint part 10 and pressure shoe parts 11; both sides of the upper part of the back support 1 are connected with single-arm components with the same structure, and each single-arm component includes a shoulder joint part 2, an upper arm part 3, an elbow joint part 4 and a forearm part connected in sequence 5. Shoulder joint part 2 has three rotational degrees of freedom, elbow joint part 4 has one rotational degree of freedom, and a single-arm component has four rotational degrees of freedom. The four degrees of freedom of the single-arm component are flexion and extension of the elbow joint, Flexion and extension of the shoulder jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More