

A dynamic coverage method and device for dividing mobile robot indoor areas
A mobile robot, dynamic coverage technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as lack of overall environmental considerations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to explain the embodiments of the present invention or the technical solutions in the prior art more clearly, the present invention will be described in detail below with reference to the accompanying drawings and embodiments. The drawings in the following description are only some embodiments of the present invention. For those of ordinary skill in the art, other drawings can be obtained based on these drawings without creative work.
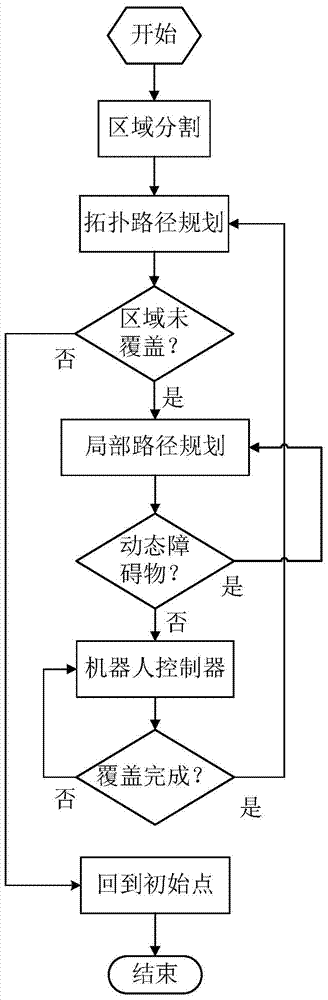
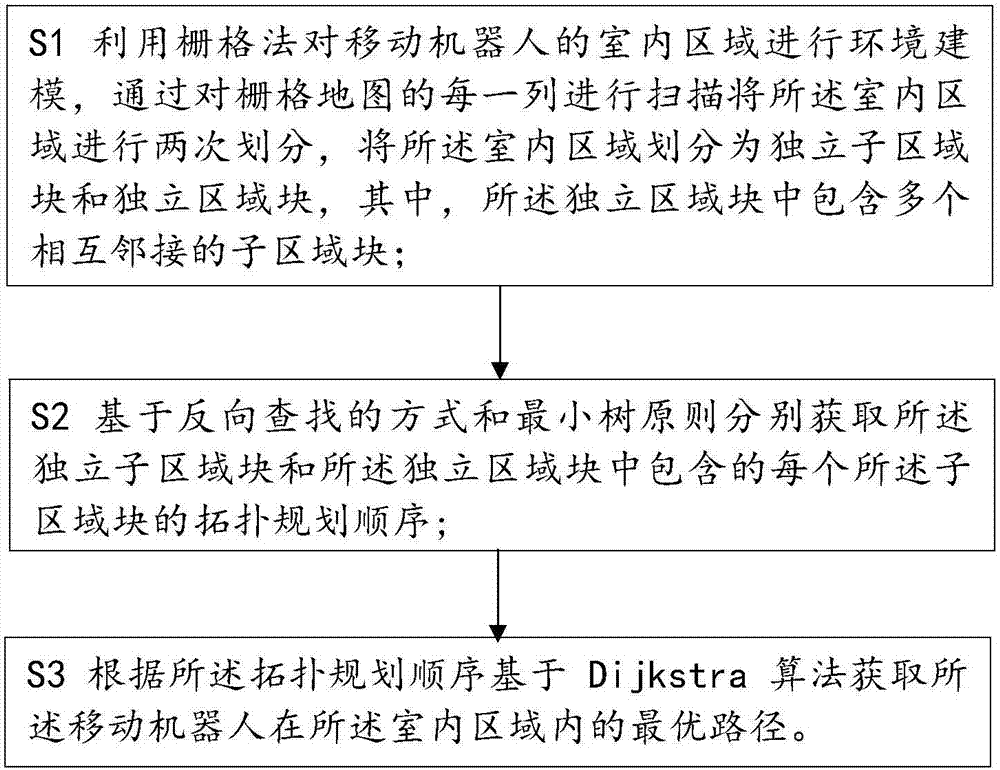
[0066] The invention is based on the mobile robot TurtleBot to complete the area coverage of the indoor environment. The mobile robot is equipped with Kinect to obtain depth information, and uses the odometer and gyroscope to obtain the distance and direction information of the robot. The algorithm flow is as follows figure 1 Shown. Specifically, such as figure 2 As shown, the dynamic coverage method for dividing the indoor area of a mobile robot provided by the present invention includes at least the following steps:
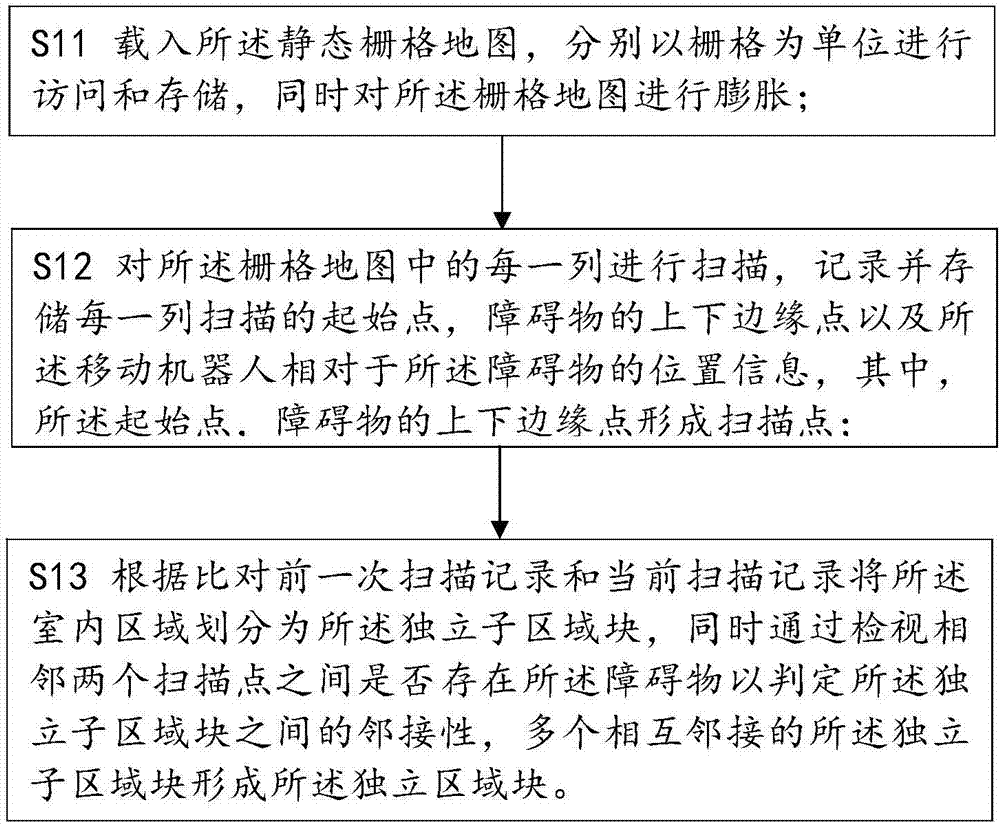
[0067] S1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More