

A 3ups parallel metamorphic mechanism for lower limb rehabilitation robot
A rehabilitation robot and metamorphic mechanism technology, applied in the field of rehabilitation robots, can solve the problems of increasing the difficulty of joint control, limiting the rehabilitation training of human joints, and difficult to achieve three-degree-of-freedom motion of the legs, so as to be beneficial to the rehabilitation process and improve the The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
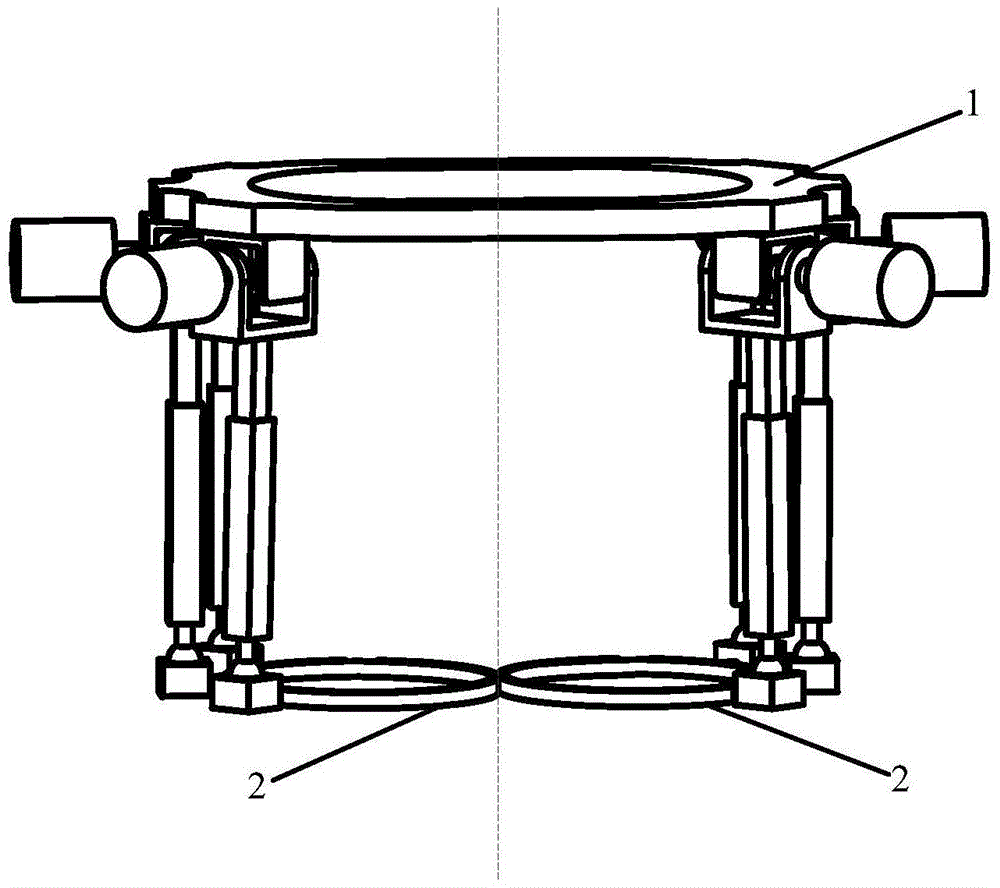
[0024] The invention provides a 3UPS parallel metamorphic mechanism for a lower limb rehabilitation robot, such as figure 1 As shown, the parallel metamorphic mechanism includes two unilateral parallel metamorphic mechanisms, which are respectively the left parallel metamorphic mechanism and the right parallel metamorphic mechanism symmetrical to the base 1, and the human body wears the parallel metamorphic mechanism , the waist of the human body is in the hollow in the middle of the base 1, and the left and right thighs of the human body are respectively equipped with a left parallel metamorphic mechanism and a right parallel metamorphic mechanism.
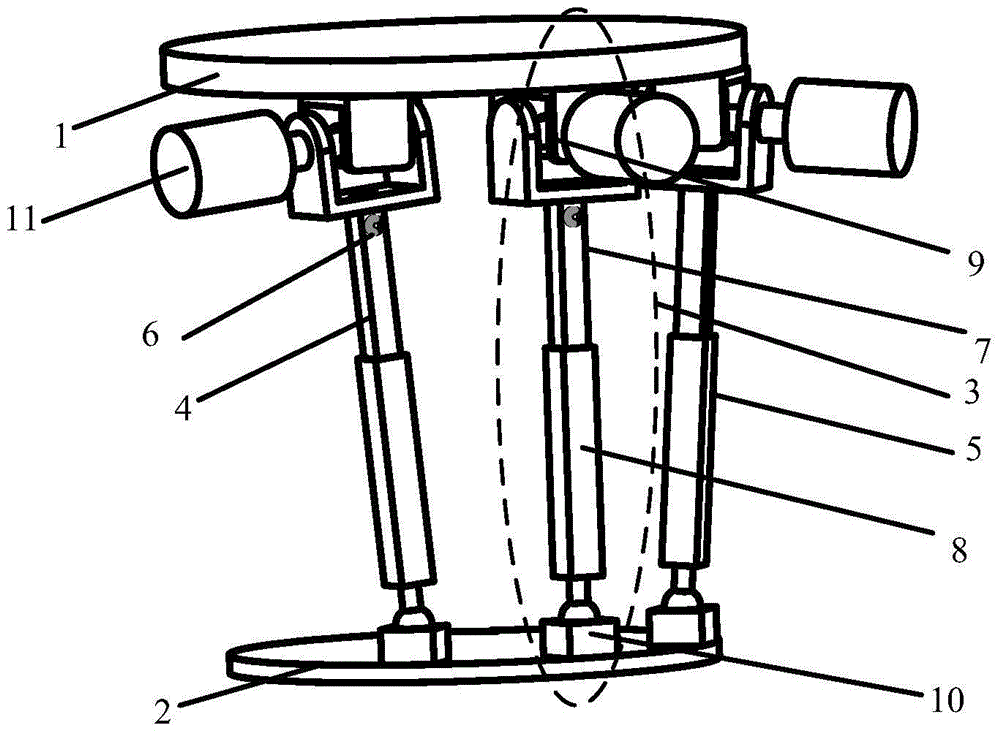
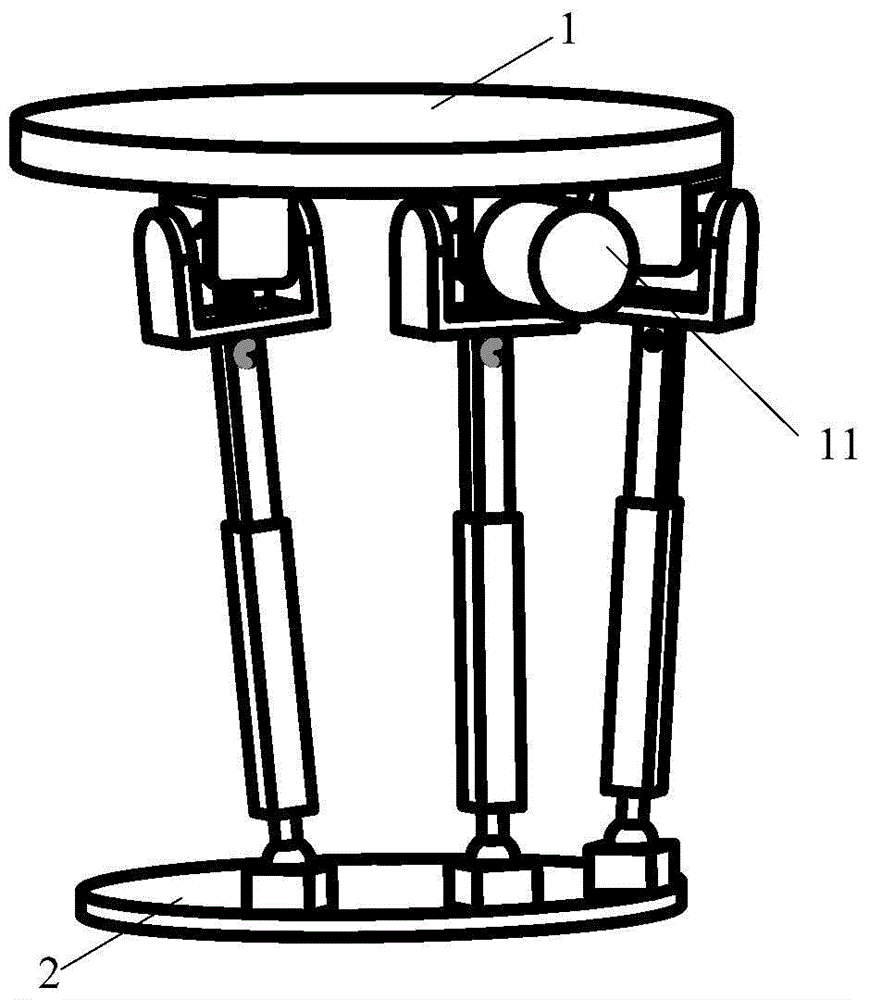
[0025] The two configurations of the unilateral parallel metamorphic mechanism are as follows: figure 2 and image 3 As shown, the unilateral parallel metamorphic mechanism includes a motion platform 2,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More