

An active and passive dual hemispherical capsule robot and its attitude adjustment and turning drive control method
A capsule robot, hemispherical technology, applied in medical science, endoscopy, surgery, etc., to achieve the effect of large observation angle range, good posture adjustment stability, and favorable posture adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Specific embodiments will be described in detail below in conjunction with the technical solutions of the present invention and the accompanying drawings.
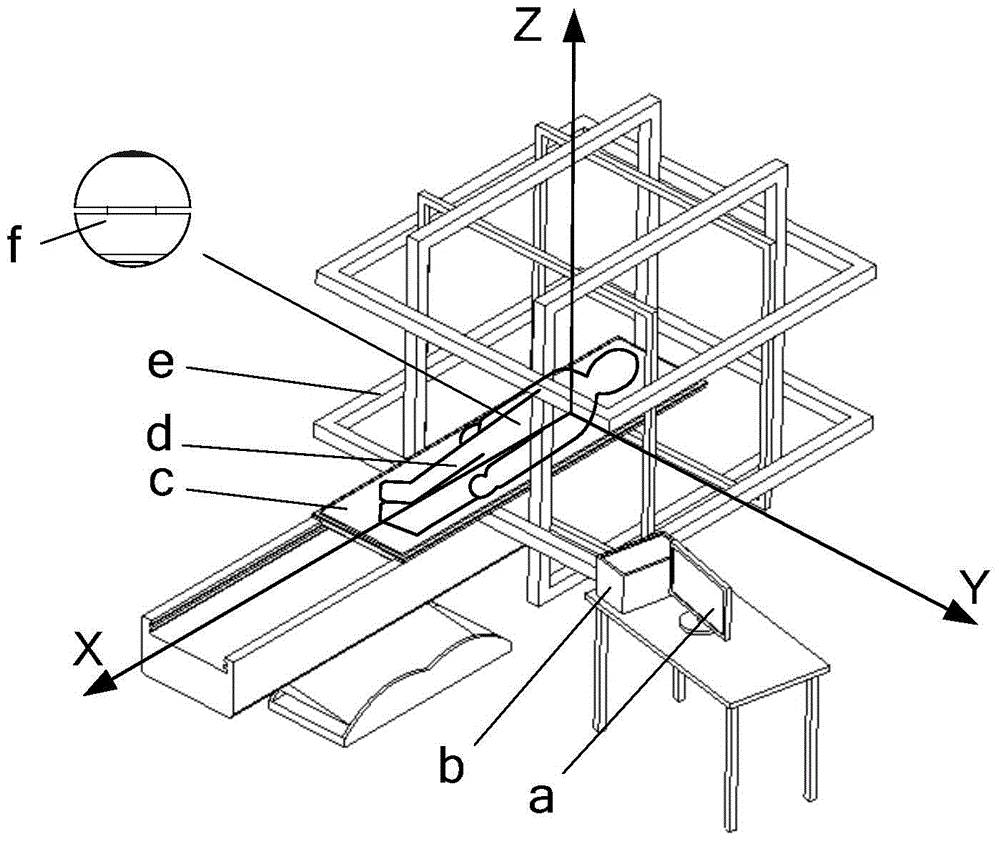
[0032] Attached below figure 1 , a brief introduction of a space universal rotating magnetic field drive device and control system for active and passive double hemispherical robots used in gastrointestinal tract detection in the process of gastrointestinal tract detection.
[0033] Three groups of coils are orthogonally nested and installed to form a three-axis orthogonally nested Helmholtz coil magnetic field superposition device e, let the patient d swallow the active and passive double hemispherical capsule robot f, and lie on the hospital bed c, adjust the hospital bed The position of c makes the patient d be in the central area of the three-axis orthogonal nested Helmholtz coil magnetic field superposition device e, and input the amplitude and phase related to the azimuth angle of the robot axis into the ope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More