

IPSO-extended-implicit-generalized-prediction-based servo system position control method
A servo system, generalized prediction technology, applied in the field of servo system control, can solve problems such as ignoring system nonlinearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described below in conjunction with accompanying drawing:
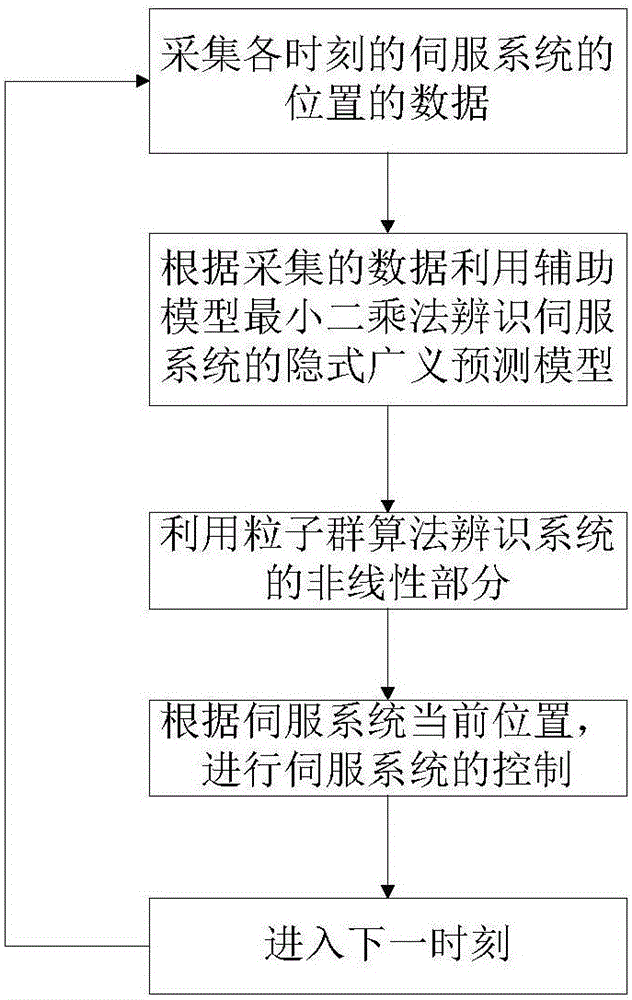
[0058] Steps of the invention
[0059] (1) collect the data of the position of the servo system at each moment;
[0060] (2) Identify the implicit generalized prediction model of the servo system at the current moment by using the auxiliary model least squares method according to the collected data;
[0061] (3) According to the collected data and the predicted output value of the identified implicit generalized prediction model, the particle swarm algorithm is used to identify the nonlinear part of the system model
[0062](4) Control the position of the servo system according to the current position of the servo system; make it move according to the predetermined trajectory;
[0063] Enter the next moment and return to step (1);
[0064] According to the collected data, using the auxiliary model least squares method to identify the implicit generalized prediction model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More