A sliding mode control method for quadrotor aircraft based on global stability
A technology for a quadrotor aircraft and a control method, which is applied in the field of flight control and can solve problems such as complex coupling relationships between aircraft subsystems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0110] Aiming at the problems in the prior art, the present invention provides a sliding mode control method for a quadrotor aircraft based on global stability.
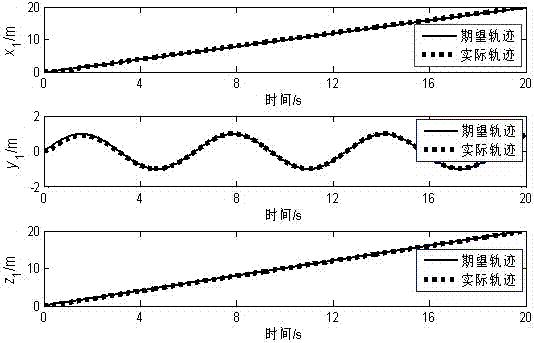
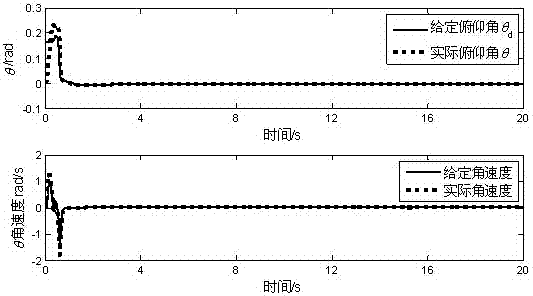
[0111] The design goal is the tracking control of the trajectory and angle of the quadrotor aircraft. In the specific implementation, the simulation and verification of the trajectory tracking control of the quadrotor aircraft based on global stability and the closed-loop control system are realized with the help of the Simulink toolbox in Matlab R2012b. Here, by introducing a certain representative implementation manner, the related design and the adjustment method of the design parameters in the technical solution of the present invention are further described. Figure 7 A schematic diagram of a quadrotor aircraft.
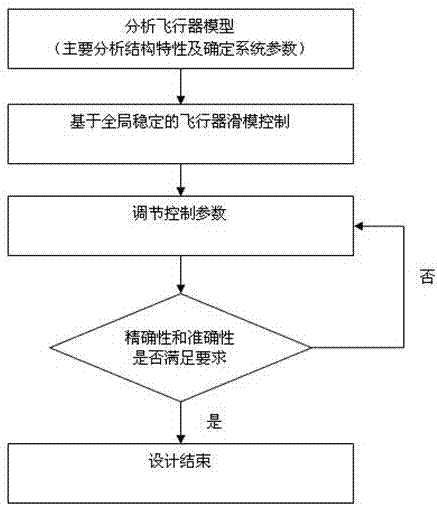
[0112] See image 3 , a sliding mode control method for a quadrotor aircraft based on global stability in the present invention, the schematic diagram of the closed-loop control system of the quadroto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More