

A bionic foot walking aid device with drive control
A technology of driving control and driving device, which is applied in the direction of appliances that help people walk, motor vehicles, transportation and packaging, etc. It can solve the problems of low safety in use, inability of walking aids to assist walking independently, laborious use, etc., and achieve safe use High performance, good obstacle crossing and ladder crossing performance, good docking stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
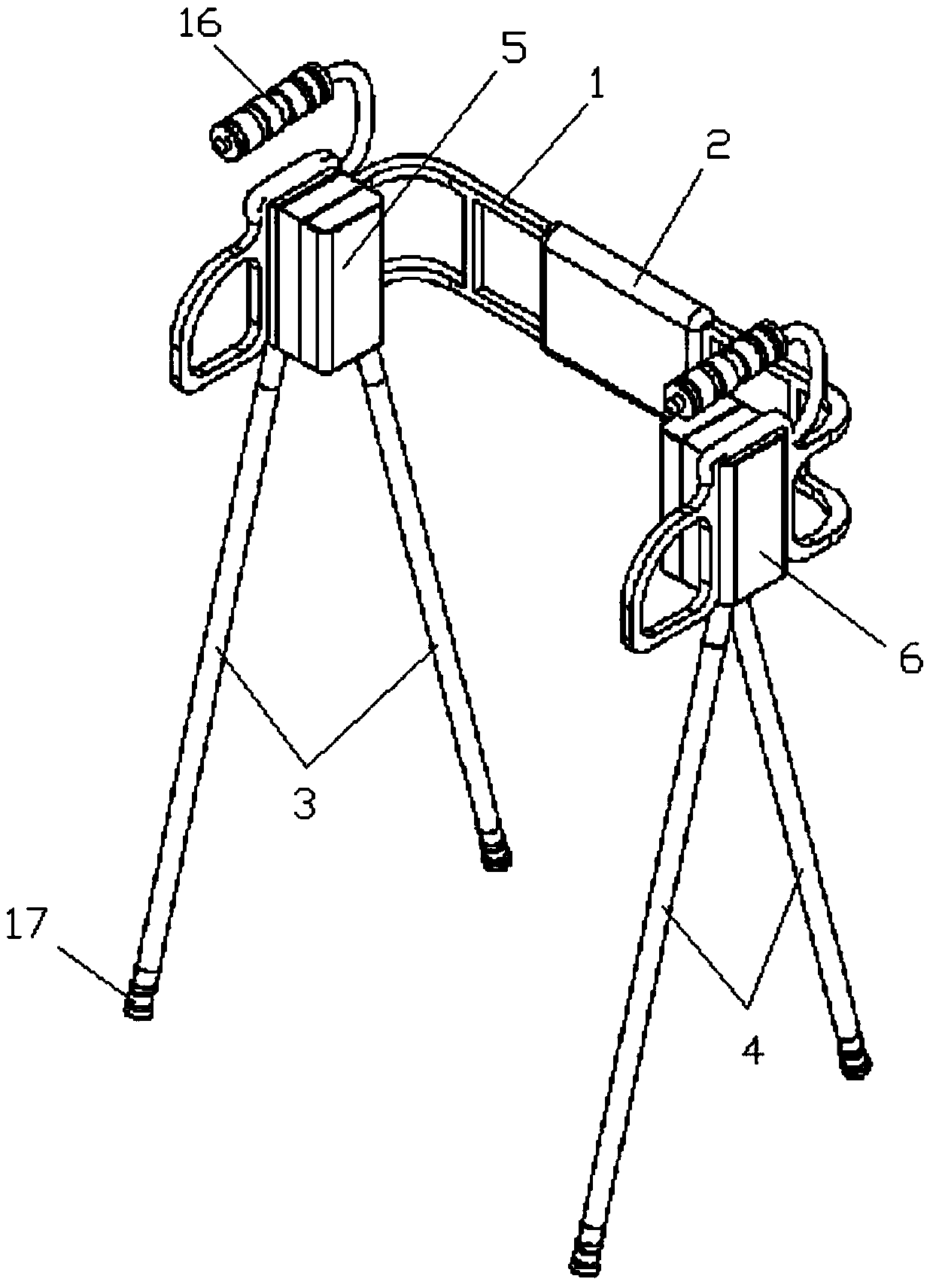
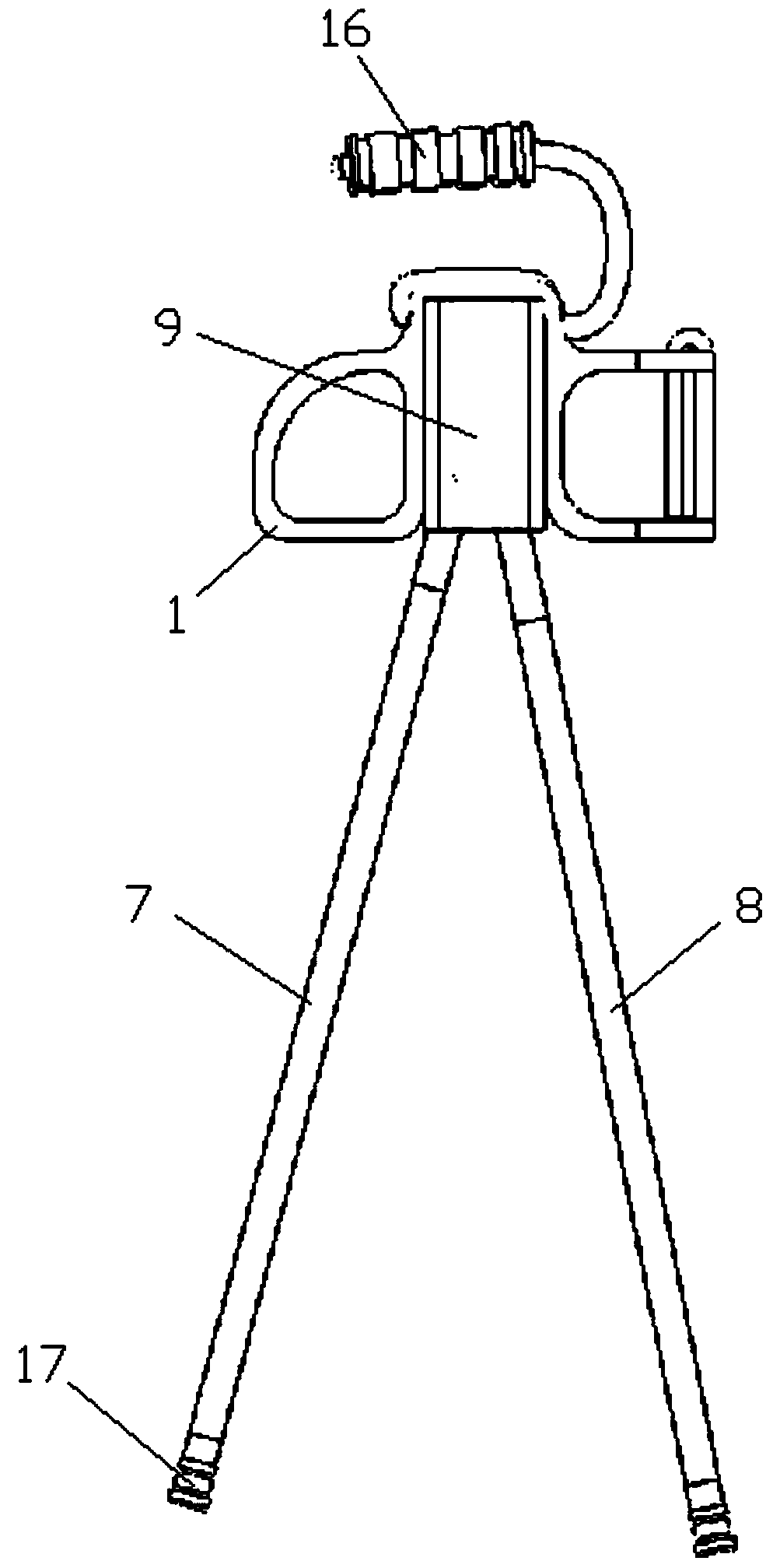
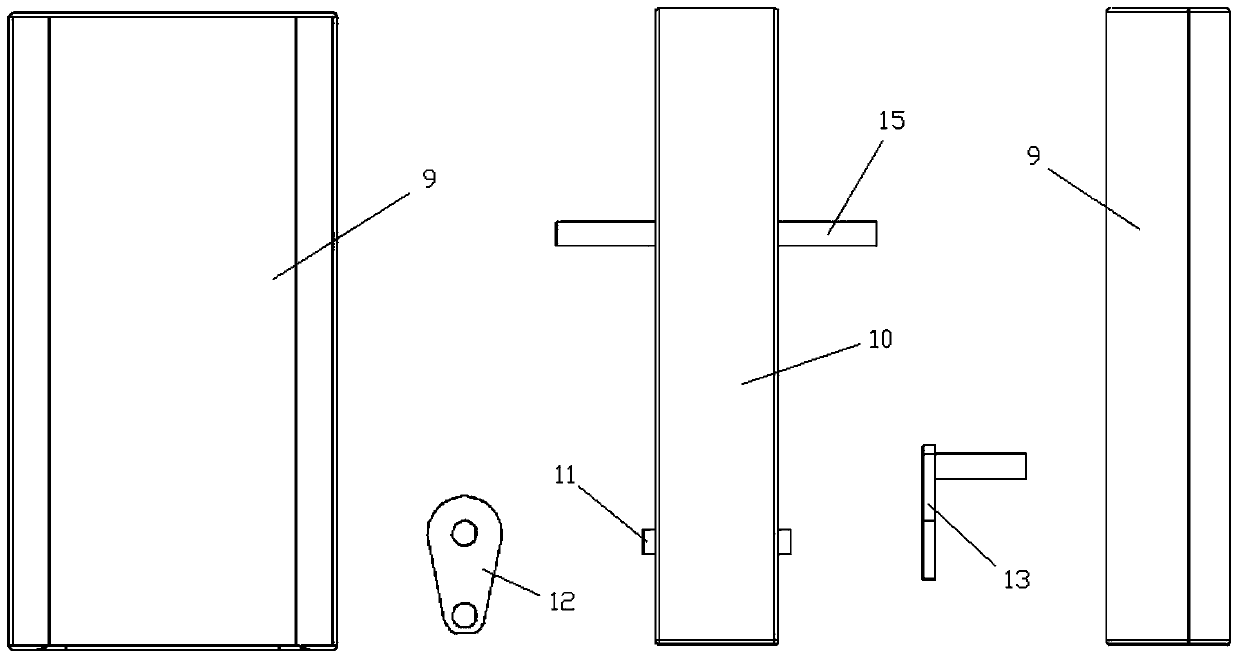
[0038] Embodiment 1: As shown in the figure, the bionic foot walking aid with drive control of the present invention includes a main body bracket 1, a control unit 2, a left supporting leg group 3, a right supporting leg group 4, and a left supporting leg group driving the left supporting leg group. Swing leg drive device 5 and the right swing leg drive device 6 that drives the right support leg group, the control unit 2 is arranged on the main body support 1, and the left support leg group and the right support leg group both include the first swing alternately swinging back and forth. A support leg 7 and a second support leg 8, the left swing leg driving device and the right swing leg driving device both include a housing 9 fixed on the main body bracket and a power unit 10 arranged in the housing and controlled by a control unit;
[0039] The power output shaft 11 of the power device is provided with a first rotating arm 12 and a second rotating arm 13, the first rotating ar...
Embodiment 2
[0045]Embodiment 2: The bionic foot walking aid device with driving control of the present invention includes a main body bracket 1, a control unit 2, a left supporting leg group 3, a right supporting leg group 4, and a left swing leg driving device 5 for driving the left supporting leg group , and the right swing leg driving device 6 that drives the right support leg group, the control unit is arranged on the main body bracket, and the left support leg group and the right support leg group all include the first support leg 7 and the second support leg that alternately swing back and forth. Supporting legs 8, the left swing leg driving device and the right swing leg driving device both include a housing 9 fixed on the main body bracket and a power device 10 arranged in the housing and controlled by a control unit;
[0046] Both the first support leg 7 and the second support leg 8 include an upper leg 18, an electric rotary joint 19 controlled by a control unit, and a lower leg ...
Embodiment 3
[0053] Embodiment 3: The bionic foot walking aid device with driving control of the present invention includes a main body bracket 1, a control unit 2, a left supporting leg group 3, a right supporting leg group 4, and a left swing leg driving device 5 for driving the left supporting leg group , and the right swing leg driving device 6 that drives the right support leg group, the control unit is arranged on the main body bracket, and the left support leg group and the right support leg group all include the first support leg 7 and the second support leg that alternately swing back and forth. Supporting legs 8, the left swing leg driving device and the right swing leg driving device both include a housing 9 fixed on the main body bracket and a power device 10 arranged in the housing and controlled by a control unit;
[0054] The first supporting leg and the second supporting leg all include an upper leg 18, a lower leg 20, and an electric retractor 21 that connects the upper leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More