

A multi-singularity processing method, system and industrial robot
A technology of industrial robots and processing methods, applied in the field of multi-singular point processing methods, systems and industrial robots, can solve problems such as joint movement speed increase, shutdown, production safety, etc., and achieve the effect of avoiding sudden increase
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
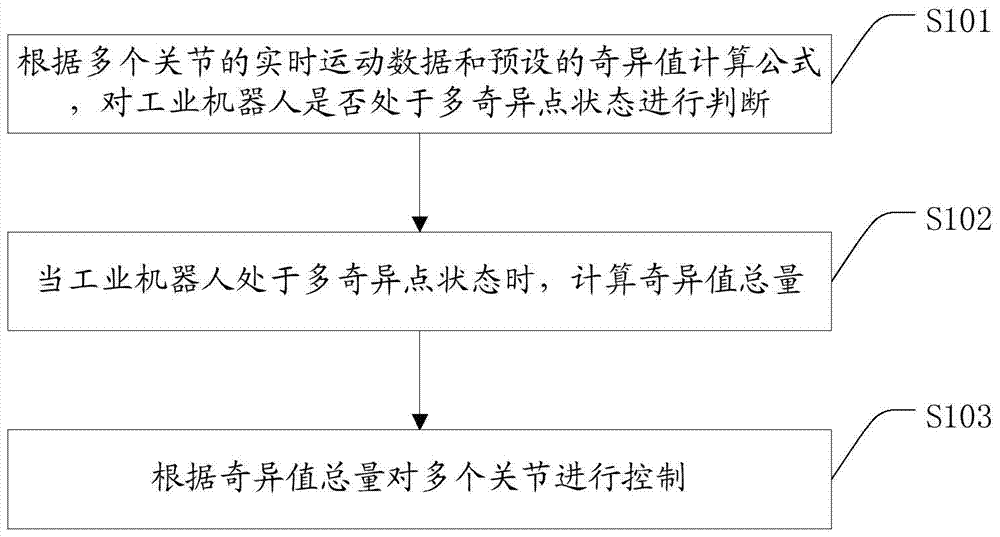
[0031] figure 1 It is a flowchart of a multi-singularity processing method provided by the embodiment of the present application.
[0032] The multi-singularity processing method provided in this embodiment is applied to an industrial robot with multiple joints. In this embodiment, an industrial robot with 6 joints is taken as an example to illustrate the technical solution provided by this application.
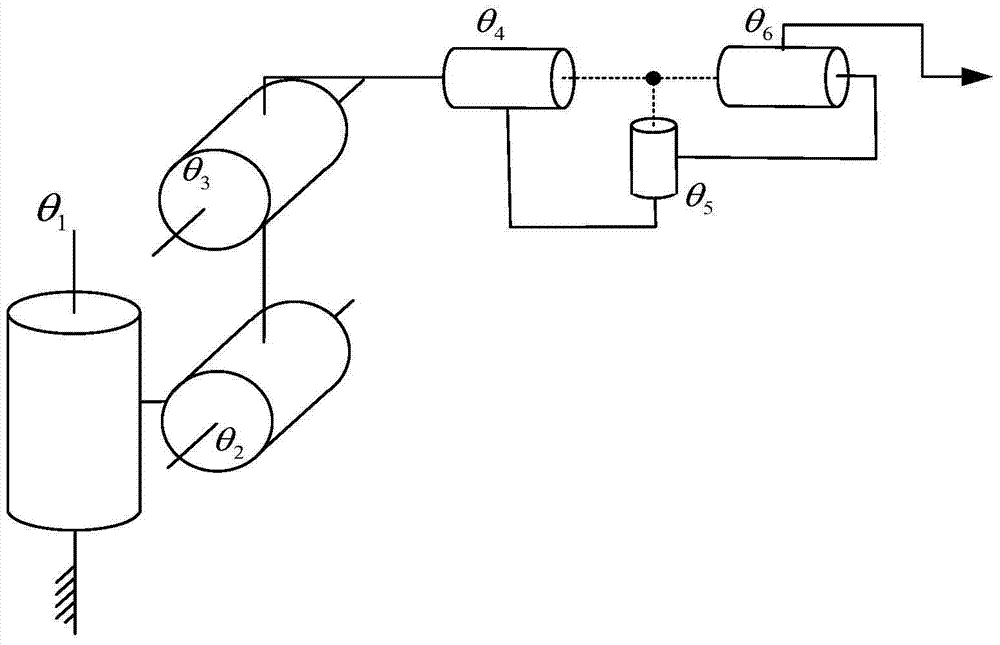
[0033] Industrial robots usually use the D-H model for structural modeling, and the position and attitude transformation between each two joints can be simulated and calculated using the D-H matrix of four parameters. Therefore, the industrial robot structure with 6 joints in this application is as follows figure 2 shown, and can be represented by six D-H joint transformation matrices:
[0034]
[0035]
[0036] Among them, c i =cos(θ i ),s i =sin(θ i ), i=1,2,...,5,6, θ i is the joint rotation angle of the i-th joint, a i is the link length between joint i and...
Embodiment 2
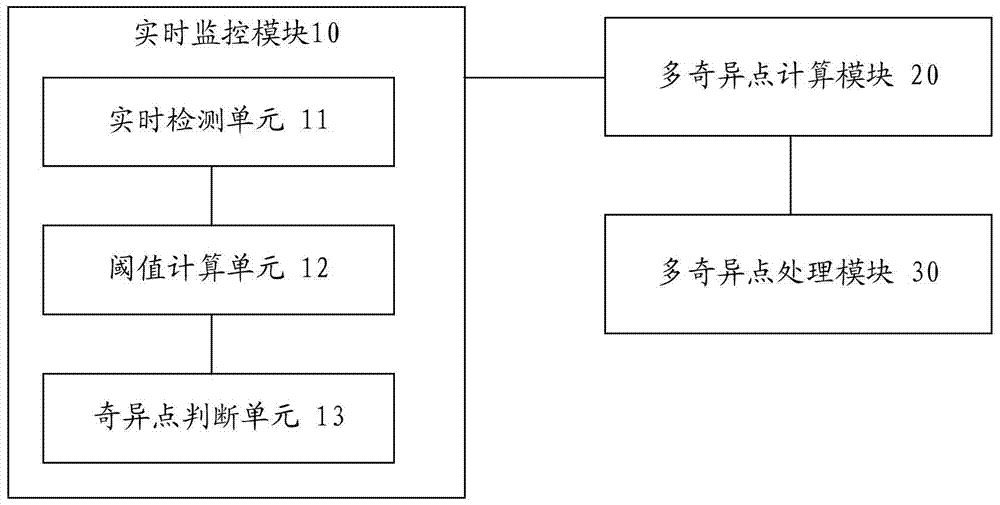
[0080] image 3 It is a structural block diagram of a multi-singularity processing system provided by the embodiment of the present application.
[0081] Such as image 3 As shown, the multi-singularity processing system provided in this embodiment is applied to an industrial robot with multiple joints. This embodiment takes an industrial robot with 6 joints as an example to illustrate the technical solution provided by this application, specifically including a real-time monitoring module 10. A multi-singularity calculation module 20 and a multi-singularity processing module 30 .
[0082] The real-time monitoring module 10 is used to judge whether the industrial robot is in a multi-singularity state according to the real-time motion data of multiple joints and the preset singular value calculation formula. Specifically, it includes a real-time detection unit 11 , a threshold calculation unit 12 and a singular point judgment unit 13 .
[0083] The real-time detection unit 1...
Embodiment 3
[0120] This embodiment provides an industrial robot with multiple joints, specifically 6 joints. The industrial robot is provided with the multi-singularity processing system provided in the above-mentioned embodiment, which can avoid multiple singular points from appearing simultaneously under the control of the system. This ensures that downtime and safety incidents are avoided.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More