

Method for defect searching of power transmission lines of multi-rotor unmanned aerial vehicles
A multi-rotor drone and transmission line technology, applied in the field of electric power, can solve the problems of unmanned aerial vehicles, errors, visual blind spots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
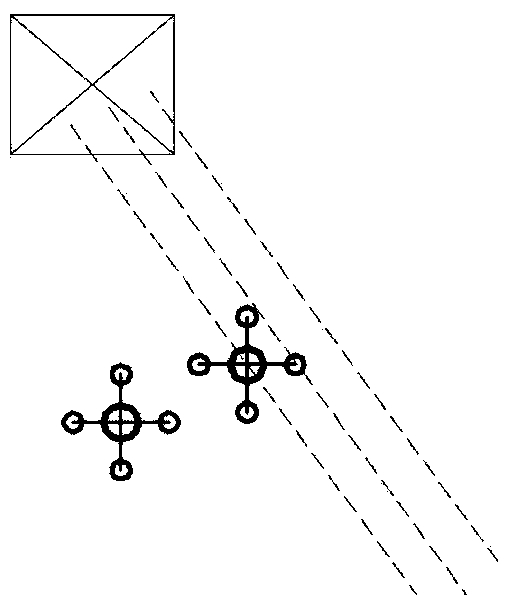
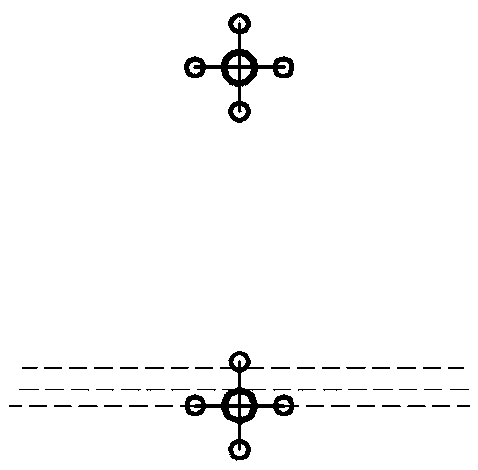
[0014] See figure 1 , figure 2 , a multi-rotor unmanned aerial vehicle transmission line defect search method, the present invention is characterized in that two unmanned aerial vehicles are used to fly at the same time, one unmanned aerial vehicle for normal inspection, and the other unmanned aerial vehicle between the unmanned and the unmanned aerial vehicle Observe the vertical or horizontal orientation of the object, and when the drone uses a fixed-focus lens, the spatial distance should be kept between 3m-12m, and when the drone uses a zoom lens, the spatial distance should be kept at 8m-20m range.
[0015] The observation UAV of the present invention adopts a different model from the operation UAV and image transmission transmitters of other frequency bands, and re-adjusts the two UAVs according to the interference degree of the signal during the flight process of the test observation UAV and the operation UAV working frequency band.
[0016] The present invention ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More