

A positioning method of a robotic arm
A positioning method and technology of robotic arms, applied to manipulators, manufacturing tools, etc., can solve problems such as long correction time, shorten the adjustment time, reduce the number of reciprocating adjustments, and reduce the adjustment range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] A method for positioning a robot arm, the steps are as follows:
[0017] A. On the basis of the existing encoder on the movable joint of the robot arm, an independent angle detection device is set at each movable joint of the robot arm to measure the angle of each movable joint of the robot arm;
[0018] B. The control terminal uses the rotation angle of the movable joint collected by the encoder to control the movement trajectory of the robot arm;
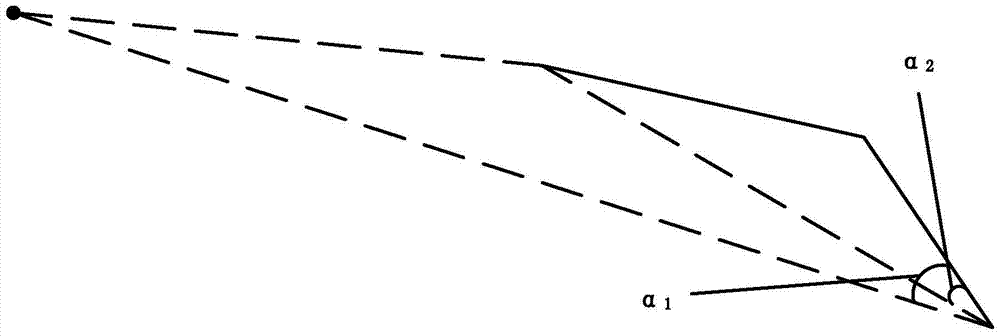
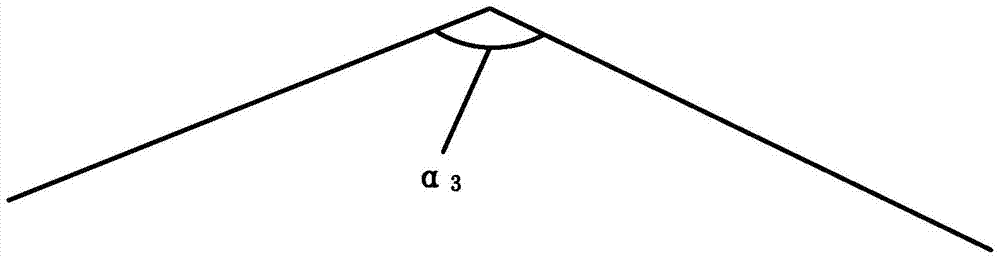
[0019] C. Measure the actual position of each movable joint on the robot arm through the angle detection device, and obtain the error between the actual angle of the movable joint and the target angle;
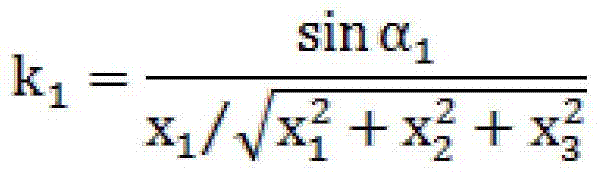
[0020] D. Set the first correlation factor between the angle error of each movable joint and the end position of the robot arm and the second correlation factor of each movable joint and its downstream movable joint, and then use the first correlation factor and the second correlation factor to each Angle adjustment of mov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More