

A multi-legged robot leg mechanism for exterior wall cleaning and maintenance
A multi-legged robot and leg mechanism technology, which is applied in the fields of mechanical transmission and mechatronics, robots, and mechanical design, can solve the problems that the adsorption force cannot provide sufficient support and cannot achieve lightweight, etc., and achieves easy maintenance, easy assembly, The effect of high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
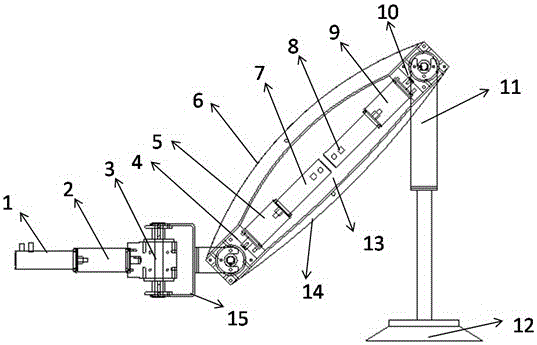
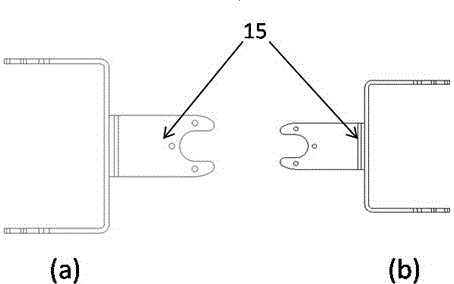
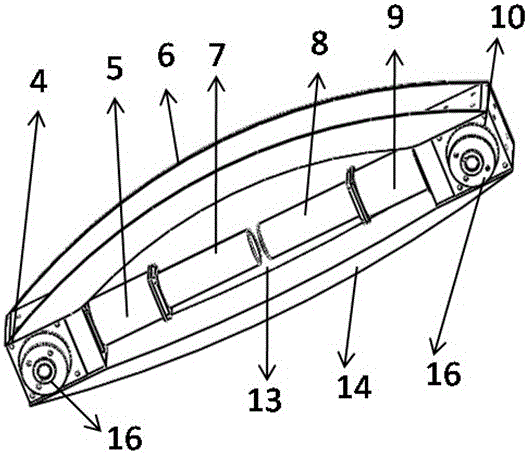
[0026] Example 1: If Figure 1-10 As shown, the leg mechanism of a multi-legged robot for exterior wall cleaning and maintenance of the present invention mainly includes lower limbs 11, suction cups 12, calves 15, thighs, No. 1 motor 1 and its corresponding first-stage reducer 2 and second-stage reducer 3, No. 2 motor 7 and its corresponding first-stage reducer 4 and second-stage reducer 5, No. 3 motor 8 and its corresponding first-stage reducer 9 and second-stage reducer 10, several methods Blue plate 16, thigh comprises upper baffle plate 6, lower baffle plate 14 and side plate 13. in:
[0027] Such as figure 1 , figure 2 with Figure 9 As shown, the second speed reducer 3 is connected with the base of the multi-legged robot by bolts. The output shaft 18 of the second speed reducer is connected with the flange 16 through the key 17, and the flange 16 is connected with the lower leg 15 through the bolt hole. The second stage reducer 3 of the No. 1 motor converts the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More