

A sucker device for wall-climbing robots adapted to complex surfaces
A wall-climbing robot and complex surface technology, which is applied in the fields of robots, mechanical design, mechanical transmission and mechatronics, can solve the problem of wall-climbing robots not being able to walk and absorb, and achieve the effects of simple structure, easy assembly, and easy maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described below in conjunction with accompanying drawings and examples of implementation.
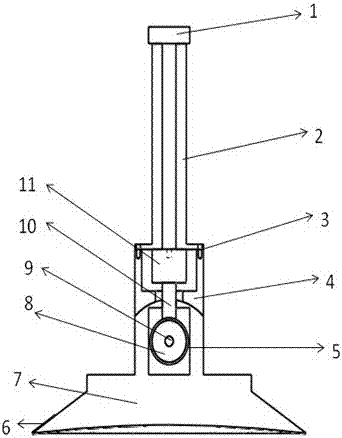
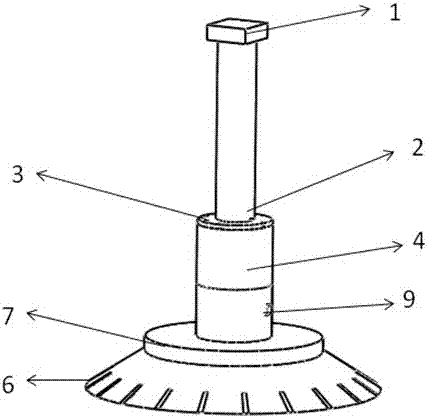
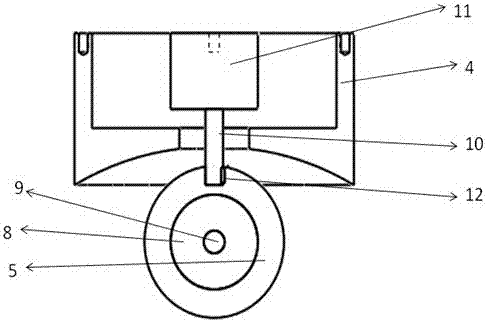
[0019] like Figure 1-4 As shown, a wall-climbing robot sucker device adapted to complex surfaces of the present invention mainly includes a control device 1, a tibia support 2, a bolt 3, a hemispherical outer cover 4, a second motor outer package 5, a sensor 6, a sucker 7, The second motor 8, the second motor power transmission shaft 9, the first motor shaft 10, the first motor 11, and the key 12. in:
[0020] like figure 1 and figure 2 , image 3 As shown, the first motor 11 is fixedly connected to the tibial support 2, the tibial support 2 is fixedly connected to the hemispherical outer cover 4 through bolts 3, and the first motor shaft 10 is connected to the second motor outer package 5 through keys.
[0021] like figure 1 and figure 2 , Figure 4 As shown, the second motor outer package 5 is fixedly connected to the second motor 8, the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More