

A method for crossing obstacles for an overhead power line inspection robot
An inspection robot and obstacle-crossing technology, which is applied to the obstacle-crossing field of overhead power line inspection robots, can solve the problems of no method for crossing obstacles, low automation, and few products, and achieve obstacle-crossing and flexible and automatic operation Effect of high degree and high practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
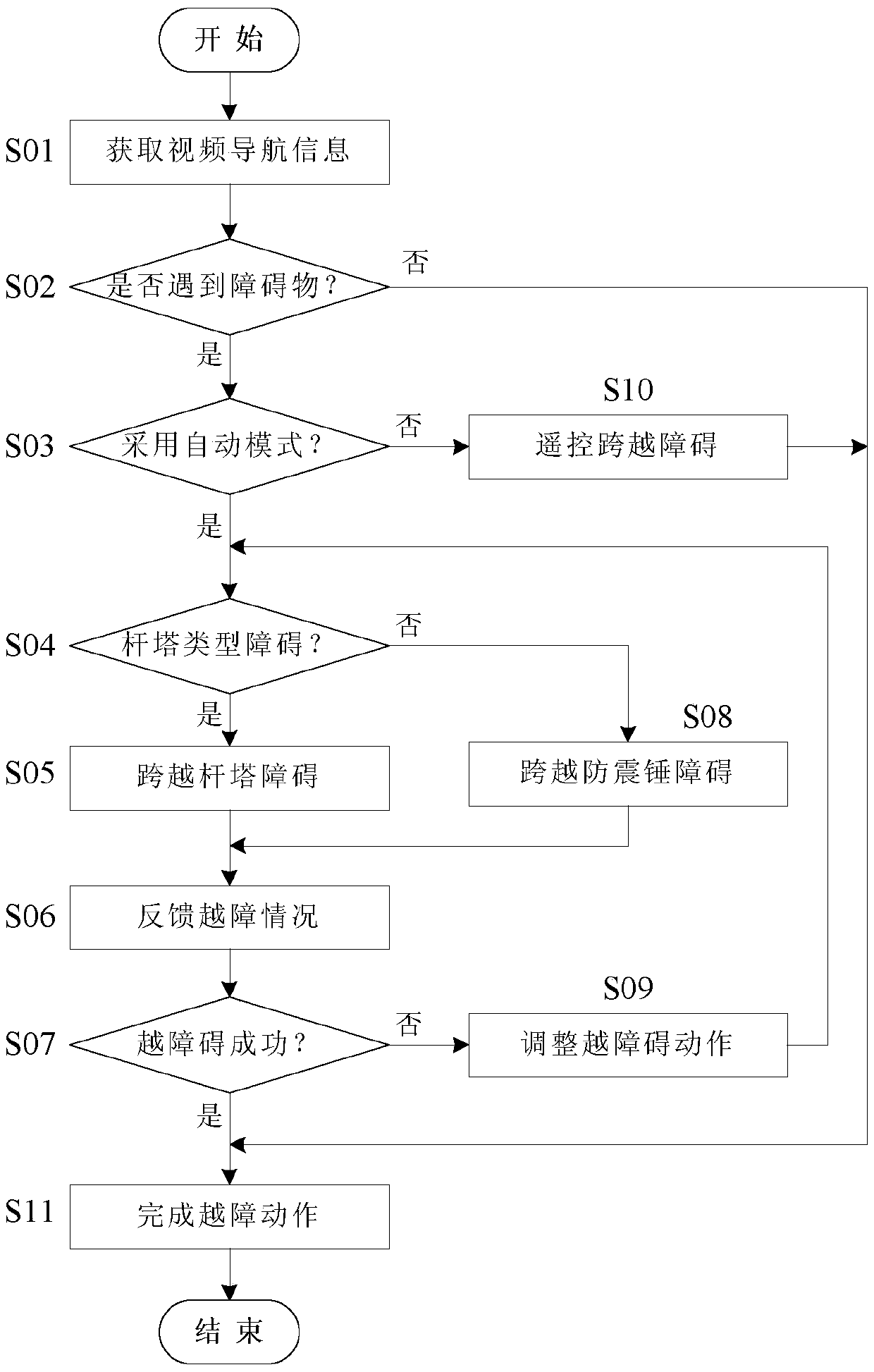
[0028] The obstacle-crossing method for an overhead power line inspection robot provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
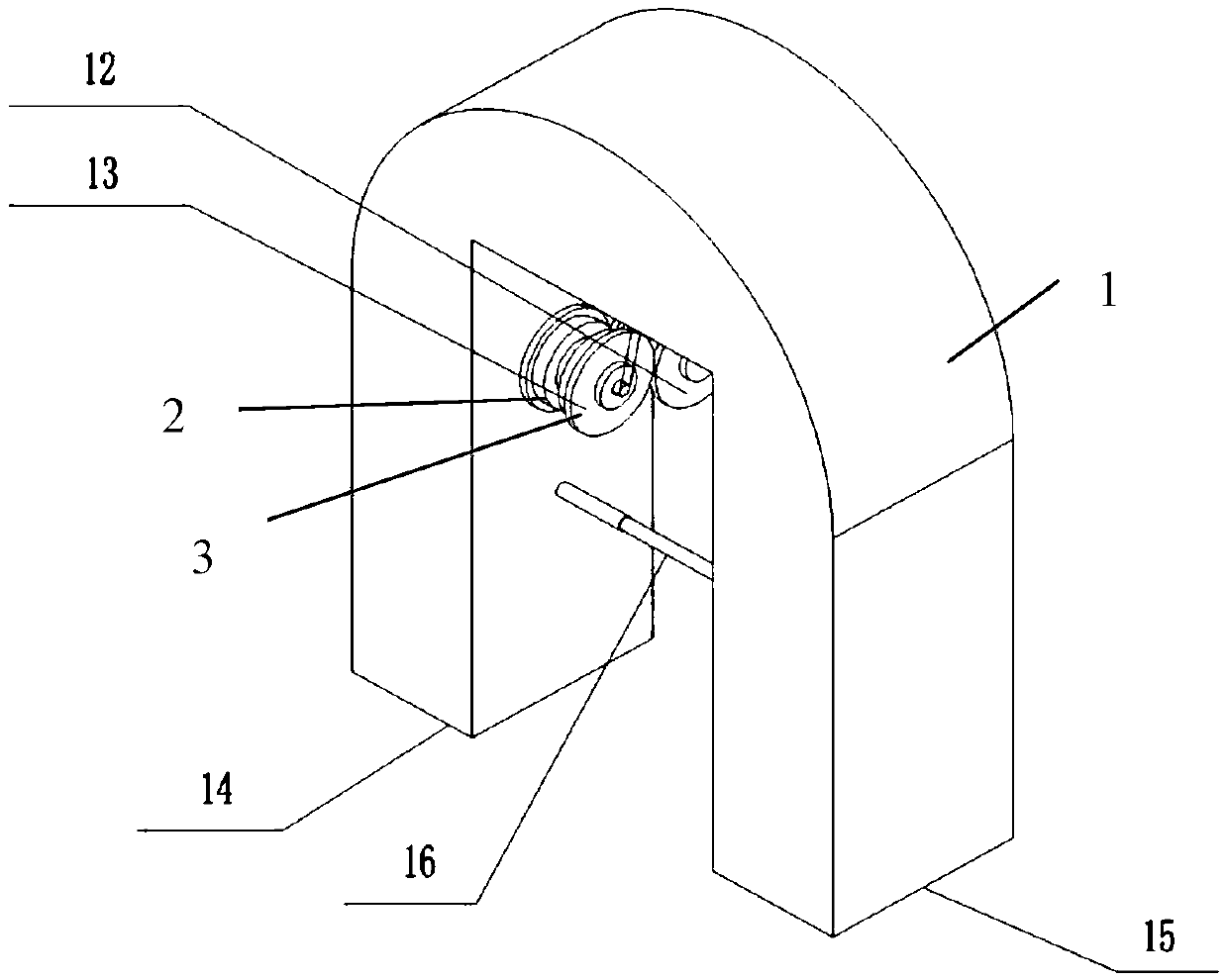
[0029] Such as figure 2 As shown, the inspection robot used in the obstacle-crossing method for the overhead power line inspection robot provided by the present invention mainly includes an n-shaped suspension box 1, a front roller 12, a rear roller 13, a protective telescopic shaft 16, a left camera 14, a right Camera 15, main controller, drive mechanism and wireless data transceiver module; wherein: n-shaped suspension box 1 is an n-shaped casing, and the opening top in the middle is provided with front rollers 12 and rear rollers 13 in a front-to-back arrangement , the bottom of the front roller 12 and the rear roller 13 is provided with a protective telescopic shaft 16; the left camera 14 and the right camera 15 are visual sensors installed on the lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More