Carpet drift estimation using differential sensors or visual measurements
An imaging sensor and vision technology, applied in the field of robotic systems, can solve problems such as inability to ensure that the robot stays, the position and/or posture of the robot does not properly control the movement of the robot, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
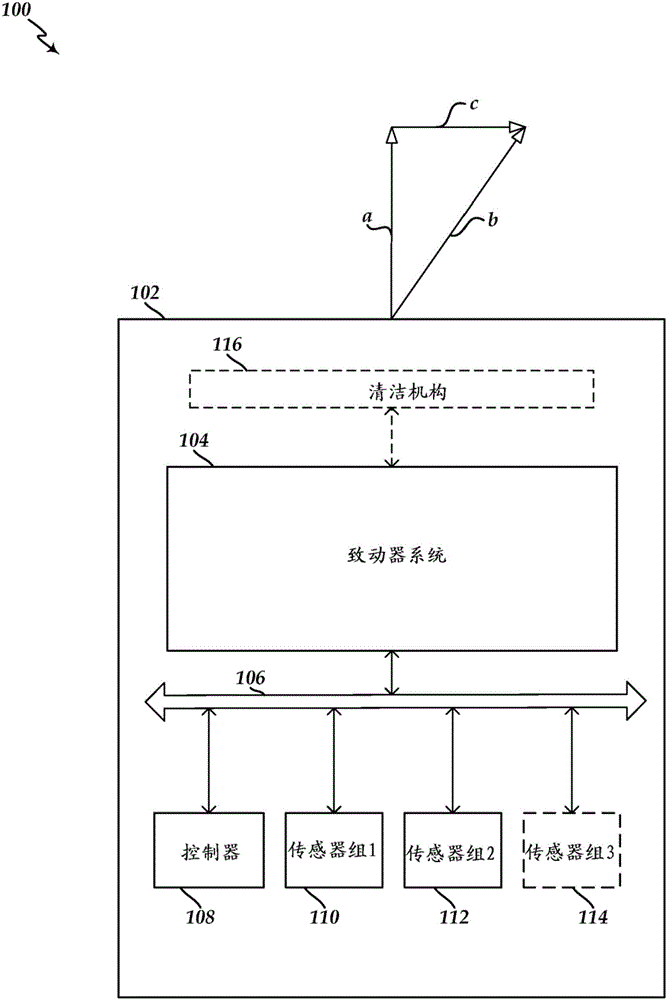
[0023] Methods and systems for estimating offset, such as carpet offset, are described. Exemplary embodiments are described herein in the context of a system or method for estimating carpet excursion experienced by a cleaning robot, but would be applicable to other types of devices, such as mobile robotic devices capable of traversing carpeted surfaces . It is to be understood that the term carpet is intended to include rugs and other floor coverings which may have texture or pile. It is also to be understood that the exemplary embodiments described herein will be suitable for estimating offsets due to effects other than carpet effects, such as, for example, sloped floors, unstable surfaces such as sand surface or mud surface) and / or motion offsets due to wind forces (e.g., relatively constant or slowly time-varying wind pushing or pulling the robot).
[0024] The carpet manufacturing process arranges the fibers of the carpet so that the fibers tend to bend in specific direc...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap