

Hybrid shock-absorbing humanoid three-degree-of-freedom mechanical foot
A technology with a degree of freedom and a mechanical foot, which is applied in the field of humanoid robots, can solve the problems of less freedom of movement, lack of vibration reduction performance, and inability to adapt to the ground environment, and achieve the effect of simulation and vibration reduction characteristics and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
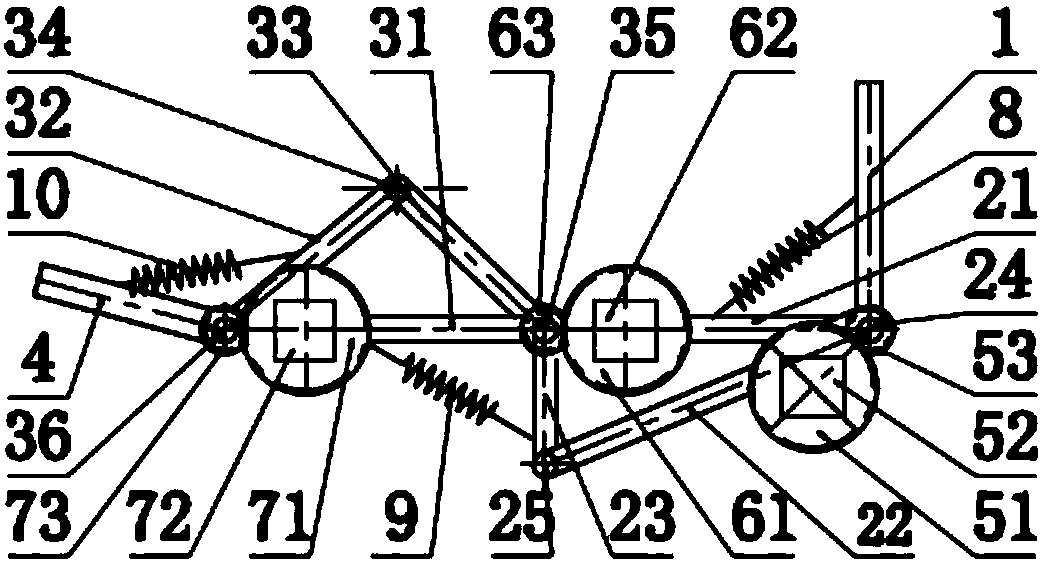
[0014] see figure 1 As shown, the hybrid shock-absorbing humanoid three-degree-of-freedom mechanical foot of the present invention includes a mechanical calf 1, tarsal rod A21, tarsal rod B22, tarsal rod C23, metatarsal rod A31, metatarsal rod B32, metatarsal rod C33, Mechanical toe 4, the shank spring 8 that connects mechanical shank 1 and tarsus bar A21, the ankle gear 51 that is installed on the tarsus bar B22, the ankle motor 52 that output shaft links to each other with ankle gear 51, and ankle gear 51 Ankle pinion gear 53 engaged with each other, large tarsus gear 61 installed on tarsus bar A21, tarsus motor 62 connected to tarsus large gear 61, tarsus pinion 63 meshed with tarsus large gear 61 , ankle shaft 24, tarsal hinge 25, metatarsal shaft 35, toe shaft 36, tarsal spring 9 connecting tarsal hinge 25 and metatarsal bar A31...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More