

Automatic manipulator
A technology of manipulators and manipulators, applied in the direction of manipulators, program-controlled manipulators, feeding devices, etc., can solve the problems of relying on manual loading and unloading, and the inability to realize mechanized production, so as to improve efficiency, flexibility and safety, and overcome single application Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
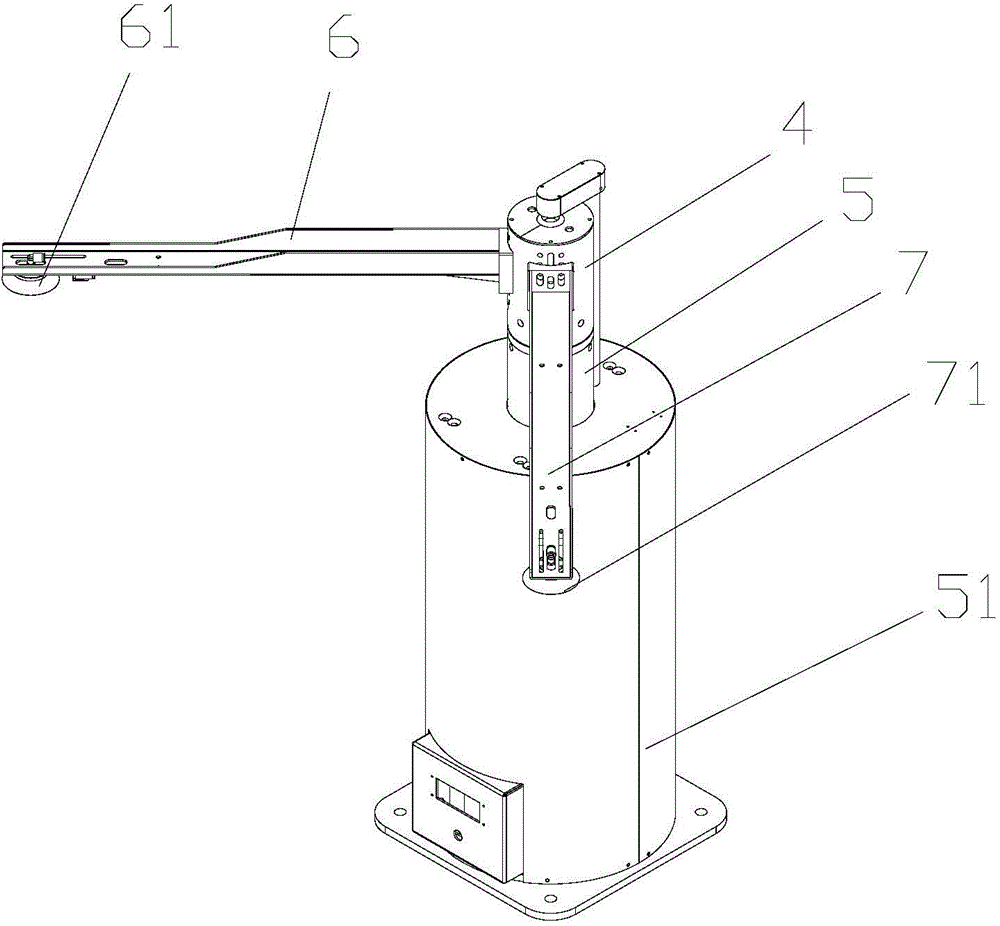
[0023] In this automatic manipulator embodiment scheme, such as figure 1 As shown, the angle between the first mechanical arm 7 and the second mechanical arm 6 is 90°, and its working principle is as follows:
[0024] Manually place the workpiece to be processed on the loading table, and the system detects that there is material, and the double-sheet mechanism separates the workpiece, and is checked by the double-sheet detection system to ensure that it is a single workpiece;
[0025] The rotating shaft 4 drives the first mechanical arm 7 and the second mechanical arm 6 to rotate 45°, and the first mechanical claw 71 is placed above the discharge position of the loading table, while the second mechanical claw 61 is placed above the mold of the C-type machine tool;
[0026] The lifting shaft 5 drives the rotating shaft 4 and the first mechanical arm 7 and the first mechanical arm 7 to move downward, the first mechanical claw 71 grabs the workpiece to be processed on the loading...
Embodiment 2
[0032] Another embodiment of the automatic manipulator is also provided in the present invention. The main difference between it and the previous embodiment is that the angle between the two mechanical arms is 120°, and its working principle is as follows:
[0033] After the on-line positioning device adjusts and positions the workpiece on the conveyor belt, the turning mechanism grabs the workpiece and transfers it to the positioning mechanism;
[0034] The rotating shaft 4 drives the first mechanical arm 7 and the second mechanical arm 6 to rotate 60°, and the first mechanical claw 71 is placed above the positioning mechanism while the second mechanical claw 61 is placed above the mold of the stamping equipment;
[0035] The lifting shaft 5 drives the rotating shaft 4, the first mechanical arm 7 and the second mechanical arm 6 to move downward, the first mechanical claw 71 grabs the workpiece to be processed on the positioning mechanism, and the second mechanical claw 61 grab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More